ロボットソフトウエアと標準化
RTCの歴史と標準化へのステップ
RTCは、開発のモジュール化を進めるとともに、オープン化も進めます。そのために、
「誰かが作ったRTCを、全世界の誰でもが使えるようにする」
という前提で進んでいます。RTCは、誰でも使えるロボット共通モジュールの実現を目指しているのです。
したがって、RTCは、その仕様を国際標準仕様として公開しています。RTCは、OMG(Object Management Group)の仕様として作成され、2008年4月にバージョン1.0の仕様書が公開されました。OMGは、皆さんご存じかと思いますが、UMLやCORBAの仕様を決めているソフトウエアの標準化団体です。
さて、結論から先に書きましたが、ここで、RTCの生まれた歴史を振り返っておきます。
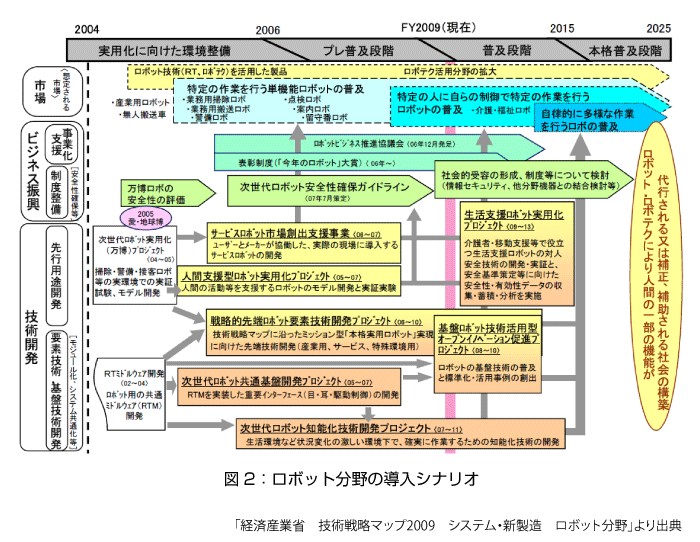
図2をご覧ください。技術戦略マップ2009の中にある、ロボット分野の導入シナリオです。第1回(http://thinkit.jp/article/950/1/)で記述した複雑なロボットシステムを、どのような戦略で実用化・普及させていくかを国が定めたロードマップです。
図の一番下にある「要素技術、基盤技術開発」のところに「RTミドルウエア開発」があります。RTCはこの中で生まれました。RTミドルウエアというのは、RTCの実行環境です。この国家プロジェクトは2002年に始まり、独立行政法人 産業技術総合研究所が中心となって、ミドルウエアを作りながらRTCという考え方を広めてきました。そしてプロジェクト終了後、OMGに持ち込まれ、主に米国と韓国と議論した上で、現在の公開仕様に至っています。
RTCは、日本のロボット国家戦略にのっとった、日本発の国際標準仕様なのです。
RTCとRTミドルウエアに関する詳しい話は、早稲田大学の菅さんの連載「ロボット開発にフル活用するRTミドルウエア(http://thinkit.jp/article/948/1/)」が参考になると思います。また、拙著『はじめてのコンポーネント指向ロボットアプリケーション RTミドルウエア超入門』を合わせてご覧いただければ理解が進むと思います。
国家戦略としてのRTC
RTCはOMG仕様として、MDA(Model Driven Architecture)の2階層に基づいて仕様化され、公開されています。その2階層とは、PIM(Platform Independent Model)とPSM(Platform Specific Model)のことです。
これはいわば、コンポーネントがもつべき型が決まっているだけの状態です。ですから、実際に流用できるRTCにするには、この仕様にのっとって、誰かがRTCを作る必要が出てきます。
実は、ここも国家戦略でフォローされています。もう一度図2を見てください。「RTミドルウエア開発」から4本の矢印が伸びていますが、この矢印の先にあるプロジェクトで具体的なRTCが作られています。この中の2つのプロジェクトに注目してみましょう。
1つは「次世代ロボット知能化技術開発プロジェクト」です。このプロジェクトでは、成果として、実際に流用可能な知能化モジュールを公開することが義務付けられています。2009年度末に中間成果、2011年度末に最終成果が各コンソーシアムから出てくる予定です。また、RTCの公開用リポジトリサーバーの作成や、使う人のためのドキュメント仕様の策定も行われています。デバッガやシミュレーターなど、開発プラットホームとしての整備も進められています。
もう1つは「基盤ロボット技術活用型オープンイノベーション促進プロジェクト」です。
このプロジェクトでは、実際にビジネスでのロボット活用を想定しているため、コンソーシアムメンバーは、ビジネス化をにらんだ構成となっています。具体的には、センサーやアクチュエータの部品をRTC化して組み込んだ、インテリジェントなホームオートメーションシステムの実現を目指して進めています。
こうして、RTC普及のための国家戦略は着々と進んでいるのです。