インターネット経由でロボットを動かす
無線通信とマイコンを内蔵したコマンド型サーボ
SPC-101Cは無線LANインターフェースを持っており、DHCPクライアントとしてIPアドレスを取得して(または固定IP設定で)ネットワークに接続します。SPC-101CはNetBSD配下のTCP/IPサーバーとして動作しており、ソケットのポート番号5001番経由でデータ送受信が可能です。
従来のロボットのほとんどはPWM(Pulse Width Modulation:パルス幅変調)方式を採用した単純なサーボモータを使用していました。そのため、細かい制御をロボットのCPUで行う必要があり、CPUの負荷が高くなるほか、プログラミングの手間もかかるという問題がありました。
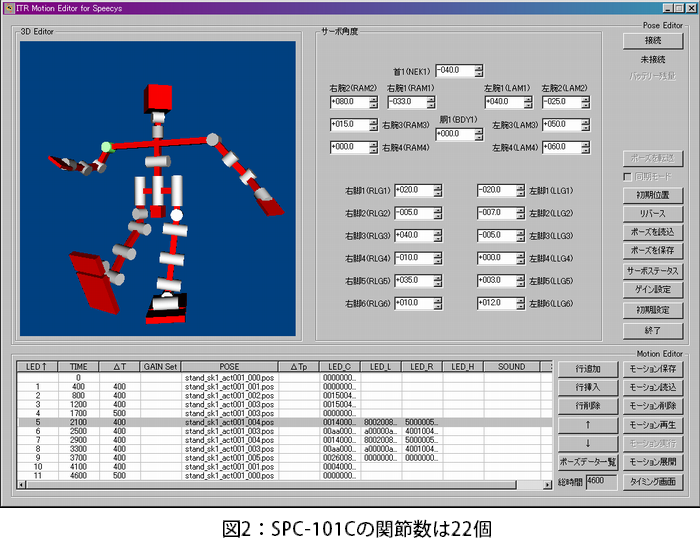
これに対してSPC-101Cは、RS-485の半二重通信によるマイコン内蔵・コマンド型のサーボモータを主に使用しています。関節自由度は22、うち20個はコマンド型サーボです(図2)。
制御用プロセッサボードRPU-50から送出したパケットを各サーボがそれぞれ解釈して内部的にPWM信号化してモータを制御しています。また、サーボのステータスを要求するなどのインテリジェントな制御が可能です。
電源を入れればすぐに動作する
SPC-101Cは組み立て済みなので、電源を入れれば立ち上がり、そのまままっすぐの姿勢で立ち続けます。また、モーションサンプルが付属しているので、すぐに動かしてみることも可能です。
実は、二足歩行ロボットを購入してすぐにこの状態にさせるのは容易なことではありません。市販の主な二足歩行ロボットは組み立てキットになっていて、まずは自分でロボットを組み立てて配線した後、ロボットをしっかりとまっすぐに立たせる作業である「トリミング」が必要です。ロボットがしっかりと立たないことには、先に進めません。
しかし、トリミングは思いのほか苦労する作業です。ももの付け根の傾き、ひざの角度や前後のずれ、つま先の上下・前後のずれ、足裏の接地角度の調整などにかかわるサーボをそれぞれ調整し、最後にロボット全体の傾きを調整する、といったことが必要なためです。
SPC-101Cにはこのトリミング作業が不要なので、すぐにロボットを動かしてモーションやアプリケーション作成に入れます。