RTとソフトウエアの歴史
RTとソフトウエアビジネスの接点
RTの概要が理解できたところで、最後に、RTの世界でソフトウエアビジネスを行うために、もう1歩踏み込んでみましょう。
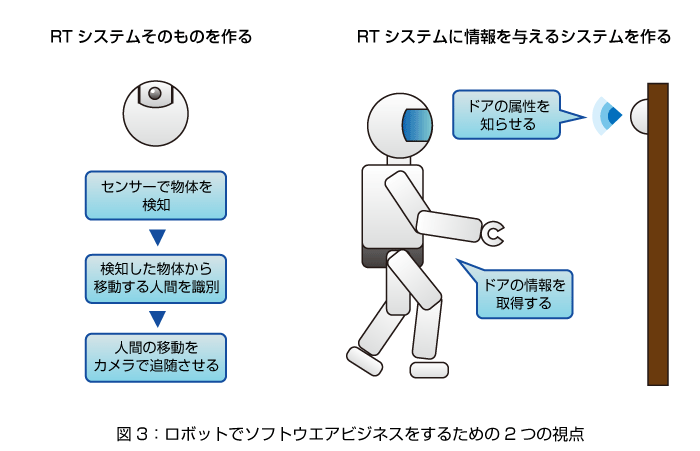
ロボットでソフトウエアビジネスをするためには、2方向からの切り口がある、と私は考えます。1つは、RTシステムそのものを作ること、もう1つは、RTシステムに情報を与えるシステムを作ること、です。
「RTシステムそのものを作ること」に関しては、ロボットへの敷居を低くした広義のRTシステムです。前述のとおり、「何かを検知し」「検知した実態に何らかの処理を施し」「結果を実世界にフィードバックする」という観点で作るシステムです。
私たち株式会社セックでは、この考え方にのっとって、「ロボット防犯システム」を試作しています。「センサーで物体を検知し」「検知した物体から移動する人間を識別し」「人間の移動をカメラで追随させる」というシステムです。駆動部は1か所のみで歩くこともできませんが、立派なロボットだ、と考えています。
私は、このロボットでサービスを考え、ビジネスをしよう、と模索しています。この「ロボット防犯システム」に関しては、連載の4回目でご紹介する予定です。
「RTシステムに情報を与えるシステムを作ること」については、ロボットの世界で「環境の情報化」と呼ばれている切り口です。
日本のロボット開発は、当初、完全自律型の鉄腕アトムを目指してきました。ところが今では、取れる情報は外界から取って動作する、という方向に向かっています。ロボットが知らないことは、周りに聞けばいい、という発想です。
これは例えば、ロボットが扉を開ける時、引き戸なのか、ドアノブがある扉なのか、をロボット自身が認識して動作を決めるのではなく、扉の側から、どういう扉かということをロボットに教えてあげようという発想です。環境を「ロボットにもわかるように情報化する」ということです。
これにより、単体のロボットに何でもかんでも詰め込む必要はなくなり、ロボットがシンプルになり、作るのが容易になり、ひいては安く作れる、ということにつながります。
これを「環境の情報化」と呼び、この情報の持たせ方を「環境の情報構造化」、と呼んでいます。
1つ1つのものにどういうIDを振るか、それはどこにあるか、そこにどういう情報を持たせるか、ということです。もう、これは完全にITの世界の話にほかなりません。
クローズド環境からオープン環境へ
さて、RTシステムへの取っ掛かりがつかめてきたところで、最後に開発プラットホームの話に言及しておきましょう。
ソフトウエアエンジニアは、確立されたプラットホームの上で仕事をしています。LinuxとWindowsの違いがあるにしろ、サーバーと組み込みの違いがあるにしろ、OSや開発言語がメーカーごとに手に負えないほど異なる、ということはありません。コンピューターの黎明(れいめい)期から、私が入社したころまではメーカーごとにクローズドな開発環境でしたが、急速にオープン化とデファクト化が浸透してきました。ですから、ソフトウエアエンジニアは、開発環境そのもので大きく困ることがなく、ソフトウエア開発に集中することができます。
ところが、現状のロボット開発はそうではありません。
これまでの、狭義の意味でのロボットは、非常に限られたメーカーでのみ作られており、しかもその開発はクローズドな環境で、メーカー内で垂直統合型で製作されてきました。ですから、ソフトウエアエンジニアがロボットソフトウエアにかかわったとしても、メーカーの個別事情を背負わなければなりません。
したがって、そこで培った技術は、ほかのメーカーに転用できないため、このままでは、ソフトウエアビジネスの広がりが望めないことになります。この現実に対する打開策が、標準化とオープンプラットホーム化です。日本は国家戦略として、ロボット開発の標準化とオープンプラットホーム化を進めています。これにより近い将来、多くのエンジニアがロボット開発に携われる時がくるはずなのです。
この部分についての説明は次回のテーマとしましょう。オープンプラットホームにのっとることで、皆さんはもう一歩ビジネスに足を進めることができると思います。次回をお楽しみにしてください。
【参考文献】
「経済産業省 技術戦略マップ2009 システム・新製造 ロボット分野」(http://www.meti.go.jp/policy/economy/gijutsu_kakushin/kenkyu_kaihatu/str2009/3_1.pdf)(アクセス:2009/05)
「次世代ロボット技術(RT)の環境構造化に関する調査研究報告書」(http://www.jara.jp/publication/dl/rt_0703summary.pdf)(アクセス:2009/05)
「HONDA | ロボット開発の歴史」(http://www.honda.co.jp/ASIMO/history/index.html)(アクセス:2009/05)