ロボットシミュレーションの構成
シミュレーションの正確さ・早さを決める「刻み時間」
最後に「surface.slip1」「surface.slip2」に関して補足します。これら設定パラメータはFDS摩擦と呼ばれ、車両特有のすべり摩擦を発生させる特殊な設定となります。車両型ロボットにおいては重要ですが、車両型ロボット以外に適用してしまうと変なすべり現象が生じてしまいますので、設定パラメータ自体をプログラムから削除してください。
「刻み時間」はシミュレーション上における単位時間であり、この時間間隔ごとにすべての物理状態(例:物体の位置・速度など)が決定され、描画されることとなります(「static void simloop」1回分)。
刻み時間はシミュレーションの「正確さ」と「速さ」に直接関係する設定パラメータですので、十分に注意して設定することが必要です。
例えば、0.01(秒)だと、シミュレーション結果は早く得られますが、動作の正確さは低くなります。それに対して、0.0001(秒)だと、物体の動作の正確さは高まるものの計算量が多くなり、シミュレーション結果を得るのに時間がかかってしまいます。ロボットシミュレーションの目的を把握し、時間を大事にするか、正確さを大事にするかは試行錯誤して決めてください。
また、物体の数が多くなるほど計算量が必要となりますので、刻み時間を細かくする必要があります。私の経験上、0.01~0.0001(秒)に設定することを推奨します。
ODEでは、ブロックを組むようにロボットを作る
ODEにおけるロボットシミュレーションの作り方はブロックを組むことと似ています。
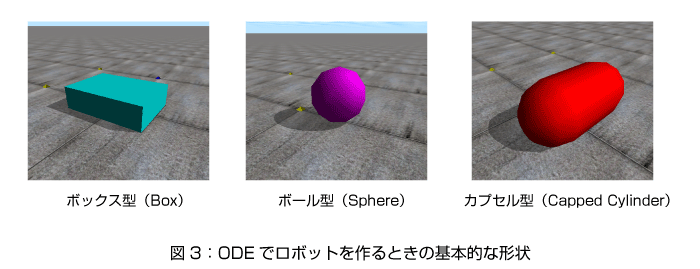
まず自分の作りたいロボットを思い浮かべ、必要な形状のブロック群を準備することから始めます。ODEにおいては3種類の物体形状(ボックス型物体・ボール型物体・カプセル型物体)の定型の生成コードがありますので、物体の形状に応じて選び、初期位置・初期角度・サイズ・重量を入力してください。
すべての物体を決めた後は、ロボットの関節の設定となります。関節の設定方法も
1)関節種類(ヒンジ関節・ユニバーサル関節・ボール関節・スライダー関節)を選択
2)関節を生成したい2物体を指定
3)関節の初期位置・軸角度を設定
4)必要に応じて関節の状態(可動範囲・粘弾性質・速度制御)を設定
というように簡単に進めることができます。
このように、物体・関節共に設定方法は簡単ですが、整合性の取れたロボットを構築するためには各物体・各関節の配置情報はあらかじめ自分自身で算出する必要があります。
と言っても、さほど難しいことではありません。中学生の数学の知識で十分ですし、3次元描画されたときに確認もできますので、気楽に試行錯誤してみてください。
今回は、主にシミュレーションのプログラム構成について解説しました。ロボット構築の具体的な内容については、次回で詳しく解説していきます。






