RTとソフトウエアの歴史
RT発展の歴史
では、ロボットはどうでしょうか?こちらは、コンピューターの歴史のような課題解決型の一本道の歴史ではありません。いわば、壮大な実験と創造の歴史です。
早稲田大学では1970年から二足歩行、ヒューマノイドロボットの研究を行っています。また、皆さんがよくご存じのASIMOを作った本田技研工業株式会社は、二足歩行の研究を1986年から行っています。この様子は、HONDAのWebサイトにビデオと共に紹介されていますので、参考にしてみてください。
素人目に見ても、二足歩行させることには大変な努力が払われてきたように見えますが、ロボットには歩行以外にもさまざまな機能が必要であり、事態はもっともっと複雑です。ロボットには以下のような機能が必要となります。
・外界との情報のやり取り・認識
・移動
・マニピュレーション
・コミュニケーション
・エネルギー源・パワーマネジメント
・安全技術
また、これらの機能を支えるために多くの技術が必要になってきます。それは、機械システムとしての技術だけでなく、コンピューターとエレクトロニクス技術、ソフトウエア技術、センサー技術、材料技術も必要です。技術は多岐に亘り、ロボットを作りあげるには、それらの技術の底上げが前提となります。ここがロボットの難しいところです。
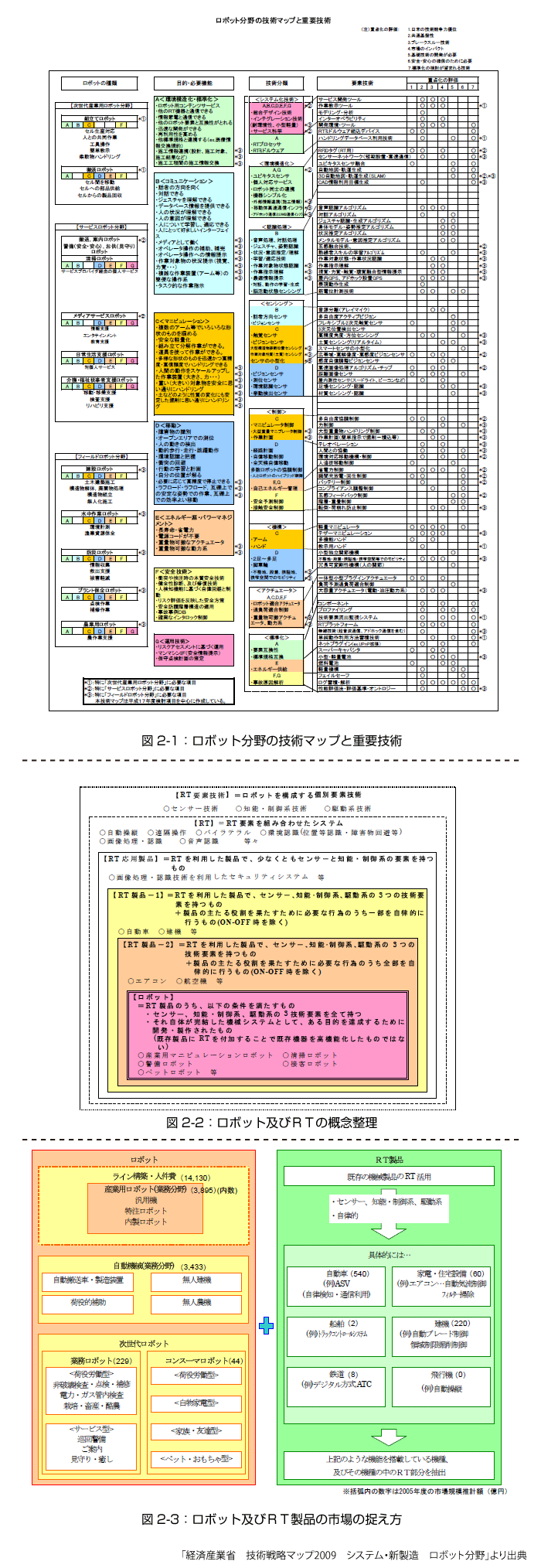
ロボットにはどんな要素があり、それがどのように絡みあっているか、を認識するには、経済産業省の技術戦略マップ2009が参考になると思います。技術戦略マップの抜粋を図2-1に示します。実にさまざまな技術が必要であることがわかると思います。
1ページで、コンピューターとソフトウエアの発展の歴史は、人類出現前後以降のような直線的な進化と表しましたが、ロボットの歴史は、さしずめ、カンブリアの大爆発のようなもの、と私は認識しています。
カンブリアの大爆発とは、地球史におけるカンブリア紀、およそ5億数千万年前のごく短期間(1000万年くらいの間)に、生命の大実験が行われたことを指します。ここで多種多様な生物が生まれ、そして絶滅し、この中で残ったものが現在の種を形成しているという話です。人類の世紀とカンブリア紀、コンピューターとロボットは、ここ数十年に限っては、まったく異なった時代を生きている、と言えます。
ロボットからRTへ
上記のとおり、ロボットは非常に複雑な統合システムです。そして、ひと口にロボットと言っても、その形態は実にさまざまです。
ASIMOのような人間型のヒューマノイドロボットだけがロボットではありません。工場ラインの産業用ロボットもそうですし、無人の搬送用台車もロボットです。最近ではお掃除ロボットも出てきましたし、エアコンのフィルター自動掃除機能もロボットと言われています。
では、ロボットをどのように定義すれば良いでしょうか。ここで、ロボットの定義を明らかにしておきます。
平成13年5月に社団法人日本機械工業連合会、社団法人日本ロボット工業会がまとめた「21世紀におけるロボット社会創造のための技術戦略調査報告書」にその概念が示されています。
============
「ロボット技術を活用した、実世界に働きかける機能を持つ知能化システム」を広い意味でのロボットとしてとらえ、その技術の総称を「RT-Robot Technology」と呼ぶ
============
いかがでしょうか。イメージがわくでしょうか。
ポイントは、「実世界に働きかける知能化システム」というところです。すなわち、「何かを検知し」、「検知した実態に何らかの処理を施し」、「結果を実世界にフィードバックする」もの、これを広義のロボット=RTとする、ということです。
狭義のロボットとRTの関連を整理した絵を技術戦略マップ2009から転載します(図2-2)。この絵からもわかるとおり、「センサー技術」「知能・制御系技術」「駆動系技術」の3要素を持ったものがRTシステムという定義です。
このRTシステムという考え方が大事である、と私は考えます。ソフトウエアエンジニアにヒューマノイドロボットのような複雑なロボットは作れません。ですが、RTシステムなら作ることが可能です。RTシステムを作って、ITだけでは不可能なサービスを考えることができたら十分にビジネスとして成り立ちます。
ですから、複雑な部分は研究者の方にお任せして、われわれは、われわれが得意な部分から手をつけていきましょう。






