さあ!プログラムを作るぞ
さあ!プログラムを作るぞ
それでは手始めに、2秒直進して止まるプログラムを作りましょう。
環境構築のときに作成されたcygwinフォルダ配下のnxtOSEKフォルダにsample_jspというフォルダが存在すると思います。この中にforwardというフォルダを作成して、以下のようなファイルを作成します。
※helloworldフォルダをコピーしてファイル名や必要な部分だけを修正しても良いでしょう。
※ソースファイルのダウンロードはここ(sample_code_090603.zip)から。
●forward.h==========================
#ifndef FORWARD_H
#define FORWARD_H
#include
#ifndef _MACRO_ONLY
extern void tsk0(VP_INT exinf);
#endif
#endif
===================================
●forward.h==========================
#include "forward.h"
#include "kernel_id.h"
#include "ecrobot_interface.h"
/* NXT-JSP hook ISR to be invoked every 1msec */
void jsp_systick_low_priority(void)
{
if (get_OS_flag()) /* check whether JSP already started or not */
{
check_NXT_buttons(); /* this must be called here to stop/exit the system */
}
}
void tsk0(VP_INT exinf)
{
/* 前進する */
ecrobot_set_motor_speed(NXT_PORT_B, 50);
ecrobot_set_motor_speed(NXT_PORT_C, 50);
systick_wait_ms(2000); /* 2000ミリ秒待つ */
/* 止まる */
ecrobot_set_motor_speed(NXT_PORT_B, 0);
ecrobot_set_motor_speed(NXT_PORT_C, 0);
ext_tsk(); /* terminates this task */
}
===================================
●forward.cfg=========================
#define _MACRO_ONLY
#include "forward.h"
INCLUDE("\"forward.h\"");
CRE_TSK(TSK0, { TA_HLNG | TA_ACT, TSK0, tsk0, 1, 1024, NULL });
#include
INCLUDE("\"at91sam7s.h\"");
DEF_INH(IRQ_PWM_PID, { TA_HLNG, jsp_systick_low_priority });
===================================
●Makefile===========================
# It needs to define this macro to use TOPPERS/JSP
TOPPERS_KERNEL = NXT_JSP
# Target specific macros
TARGET = forward_jsp
TARGET_SOURCES = \
forward.c
TOPPERS_JSP_CFG_SOURCE = ./forward.cfg
# Don't modify below part
O_PATH ?= build
include ../../ecrobot/ecrobot.mak
===================================
さて、動くかな?
プログラムを作成したら、コンパイルをします。コンパイルは、Cygwinを起動し、プログラムを作成したディレクトリをカレントディレクトリにします。ここで、
make clean all
を実行します。エラーが発生しなければ同じディレクトリ内にforward_jsp.rxeというファイルが作られます。ここでエラーが発生する場合には、プログラムか環境設定を見直しましょう。
USBケーブルでパソコンと電源を入れた教育用レゴ マインドストームNXTをつなげて./rxeflash.shを実行すると、作成されたforward_jsp.rxeプログラムが転送されます。
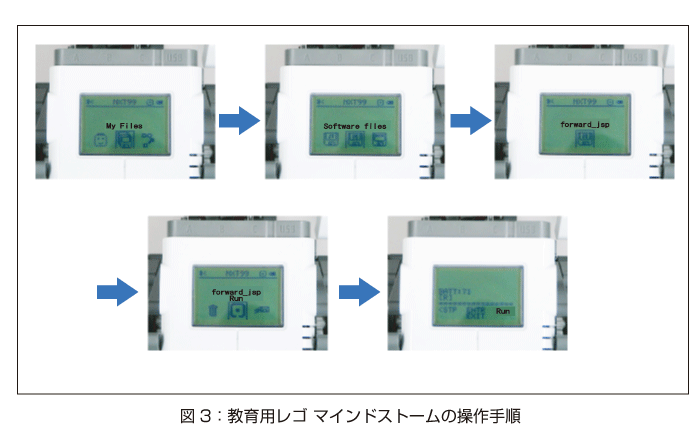
では、動かしてみましょう。教育用レゴ マインドストームNXTの画面にはメインメニューが表示されています。その中の「My Files」を選択して、オレンジ色のボタンを押し、さらに「Software files」を選択して、オレンジ色のボタンを押します。すると先ほど転送した、「forward_jsp」が表示されます。この「forward_jsp」を選択して、「Run」を選びます。
すると、nxtJSPのスプラッシュ画面が表示され、nxtJSP用のメニューが表示されます。ここでグレーの右矢印を押すと、プログラムが実行されてロボットがプログラム通りに動きます(動画:http://www.youtube.com/watch?v=LC6ON5rfAFw)。
今回は、教育用レゴ マインドストームNXTをnxtJSP(μITRON)環境上で動かしました。
次回は、自律型で動くロボットをつくるために、センサーを使ったプログラムを作っていく予定です。お楽しみに。
【参考文献】
「nxtOSEK/JSP ANSI C/C++ with OSEK/μITRON RTOS for LEGO MINDSTORMS」(http://lejos-osek.sourceforge.net/jp/index.htm)(アクセス:2009/05)
※Think IT編注(2009.06.05):本記事の初出時に、タイトルが誤っておりましたので訂正いたしました。ご迷惑をおかけいたしました。
- この記事のキーワード
バックナンバー
この記事の筆者

筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
