組み立てもプログラミングもレゴブロックの要領で
前回の記事では、今年度から中学生の必修科目にプログラミングが加わることに触れ、小中高生が参加するロボットプログラミングコンテストであるWROを紹介した。
先日、そのWROで使う教育用レゴ マインドストームの体験会に参加してきたので、今回はどうやってロボットプログラミングをするのか、簡単に解説しようと思う。実際に触った中から、今回は「なげるロボット」を例にあげて見ていこう。
ロボット(マインドストーム)をプログラミングして動かすには、大きく分けて次の3ステップで進められる。
- ロボットの組み立て
- 付属ソフトで動きをプログラミング
- 完成したプログラムをロボットに転送
出来上がったプログラムの転送が終わったら、本体のボタンを押してプログラムを実行するとロボットが動くという仕組みだ。

ここからは実際に「なげるロボット」の組み立てとプログラミングを紹介していく。
なげるロボットの組み立て
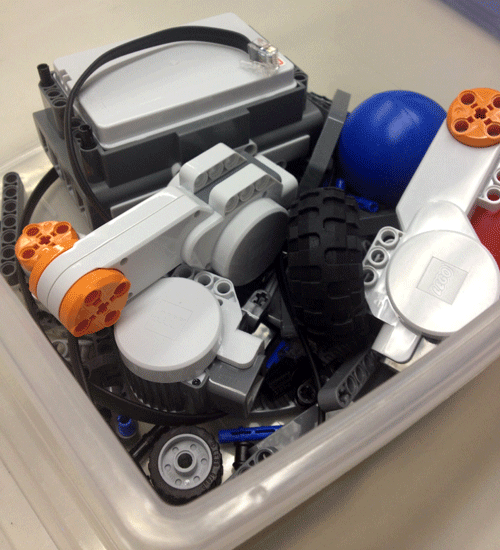
まずは組み立てだ。ロボットの組み立てを延々紹介してもあまり意味が無いので省略するが、組み立てを大きく分けると主に以下の作業がある。
- ベースロボの組み立てと配線
- なげそうちの組み立て
- ベースロボとなげそうちの組み合わせと配線
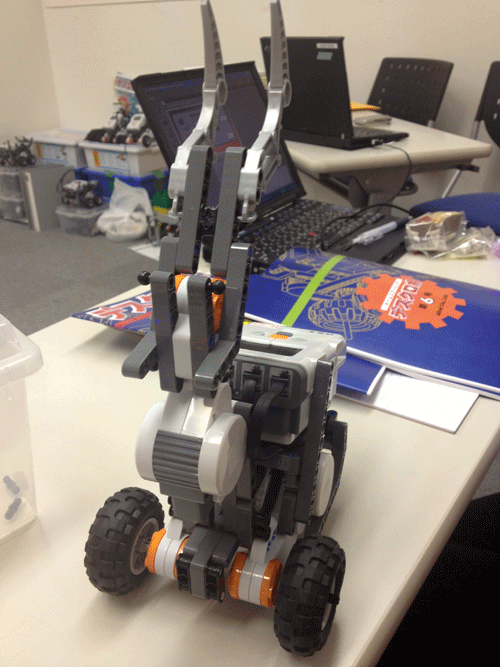
「ベースロボ」は、転送されたプログラムを実行するマインドストームの中枢となるNXTユニット本体に、レゴパーツを使ってタイヤとモーターを取り付けた、文字通り基本となるロボットだ。
「なげそうち」は、ボールを投げるアーム部分で、ベースロボとは別に組み立てる。そのため、このパーツを差し替えることで別の動きをするロボットを作ることもできる。
「ベースロボ」と「なげそうち」が組み立て終わったら、2つのパーツを組み合わせる。これでロボット完成だ。
レゴでできているので、組み立てはそう難しくはないが、大人でも15分~20分くらい夢中になって作業していたため、なかなか作り甲斐はあると思う。
投げるロボットの動きをプログラムする
ロボットは完成したが、このままでは動くことができない。PCにインストールした「教育用NXTソフトウエア」を使って、ボールを投げる動作をプログラミングしよう。
プログラミングといっても、特に難しく考える必要はない。NXTのソフトは、画面上にレゴブロックのようなパーツを並べるだけで、動きなどを指定することができる。
センサーやモーターの動きも、動く方向を選んだり、数字を入力するだけで簡単に設定できるところが、このソフトの優れたところだ。
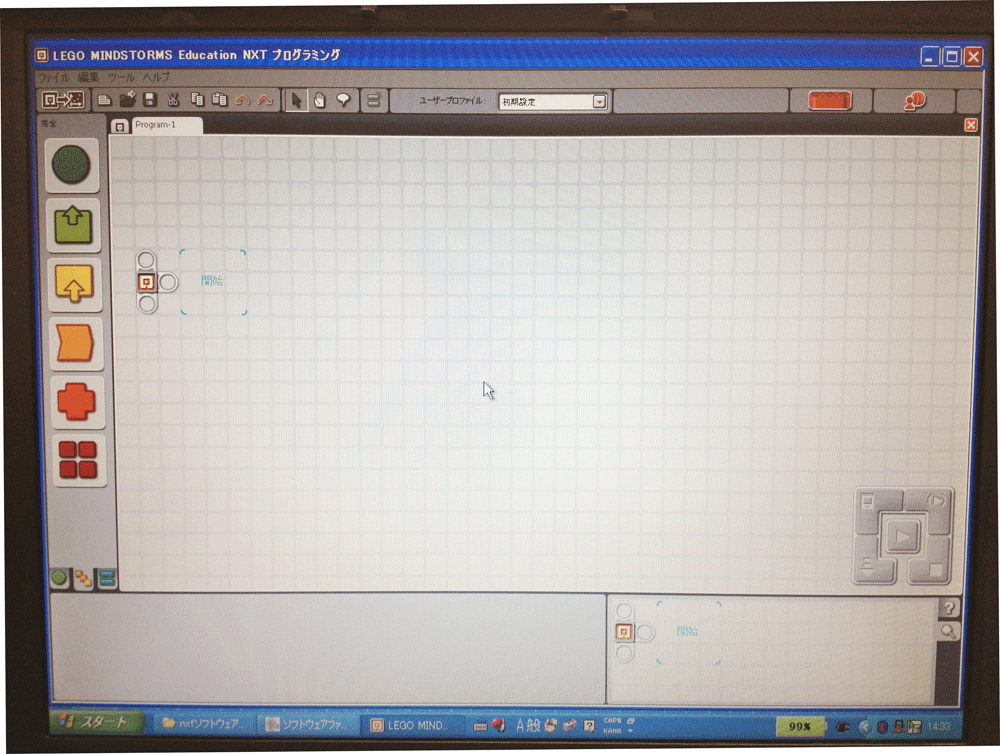
(1)ボールを投げるプログラム
NXTのソフトを開いたら、左のメニューから「モーターブロック」を画面上にドラッグする。「なげそうち」は出力ポートAにつながれているので、モーターブロックの設定画面でポートAを選択する。
下図のように「投げる方向」「パワー」「持続時間」を入力したら完了だ。

※『デスクロボ ホームスクーリング第6号』より引用
次ページに続く
関連記事
バックナンバー
この記事の筆者
筆者の人気記事
エンジニア初心者も知っておくべきUNIXの基礎知識
2023年10月26日 8:47
ゲームプログラマーを目指すにはどんな準備が必要? パソコンのスペックは? 学ぶべき言語は?
2024年1月17日 6:00
「リグレッションテスト」でソフトウェア開発を効率的するための必須ポイント
2023年7月11日 6:30
アジャイル開発とは?プロジェクト推進からチームビルディング、見積もりのコツまでを完全解説
2023年6月2日 9:27
データマイニング基礎講座 ービッグデータを業務に活かすためのポイントとは
2023年6月9日 6:00
140台以上の「さくらのVPS」を自在に操る! 仮想化の鉄人が語るVPS使いこなし術
2011年7月15日 20:00
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
