ロボット開発にフル活用するRTミドルウエア 第3回
コンフィグレーションを使ったRTC開発
RTCの機能「コンフィグレーション」 第2回でRTC開発の大まかな流れを見ました。今回はRTCの重要な機能の1つであるコンフィグレーションについて解説します。
2009年6月16日 20:00
RTCの機能「コンフィグレーション」
第2回でRTC開発の大まかな流れを見ました。今回はRTCの重要な機能の1つであるコンフィグレーションについて解説します。
コンフィグレーションとはその名のとおり、RTCの状態変数を実行時に変更する機能です。例えば前回のような画像処理におけるしきい値などのパラメータや、モータの制御パラメータ、センサーの感度などがコンフィグレーションで設定すべき値に相当します。
このようなパラメータも、前回説明したデータポートを使って設定することが可能ですが、コンフィグレーションは頻繁にデータの更新が行われない変数の受け渡しを想定して機能が実装されています。
今回の記事では音声合成ライブラリを使ったRTCを開発することで、前回のおさらいも兼ねつつ、実際にコンフィグレーションの機能に触れていきます。
| タグ | 項目1 | 項目2 | 設定値 |
|---|---|---|---|
| 基本 | RT-Component Basic Profile | Module name | AquesTalkVoice |
| Module vendor | あなたの名前 | ||
| Execution Rate | 10 | ||
| Output Project | AquesTalkVoiceCompProj | ||
| データポート | RT-Component Data InPort Profile (Addボタンで入力ポートを追加) | Port Name | in |
| Data Type | TimedString | ||
| Var Name | in | ||
| Disp. Position | left | ||
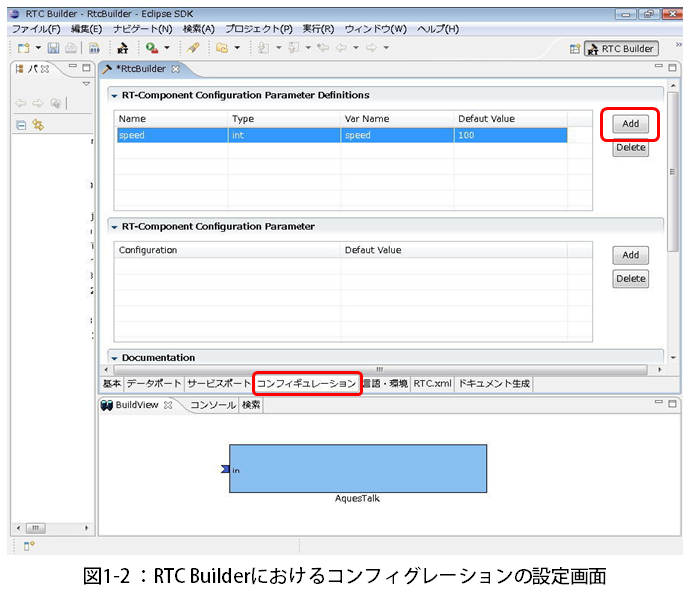
| コンフィグレーション | RT-Component Configuration Parameter Definitions | Name | speed |
| Type | Int | ||
| Var name | speed | ||
| Default Value | 100 | ||
| 言語・環境 | C++ | OS | Windows |
図1-1:RTC Builderの設定
------------------------------------
- この記事のキーワード
この記事をシェアしてください
バックナンバー
この記事の筆者

筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
