サーボモータ制御のRTC作成に挑戦
RCサーボモータとは さて、ここまでロボット用の標準化プロジェクトであるRTミドルウエアに準拠したRTコンポーネント(RTC)の開発手順についてお話ししました。
2009年6月23日 20:00
RCサーボモータとは
さて、ここまでロボット用の標準化プロジェクトであるRTミドルウエアに準拠したRTコンポーネント(RTC)の開発手順についてお話ししました。
前回(http://thinkit.jp/article/956/1/)はRTCの状態を変更するためのコンフィグレーションについて解説しましたが、今回はロボットを構成する重要な要素であるモータ(アクチュエータ)を制御するRTCを作ってみましょう。
モータはラジコンなどのホビー用途でよく使われているサーボモータ(以下RCサーボ)を使います。本来モータを制御するには、モータに関する電気的な知識のほかに、制御工学などの知識が必要です。しかしRCサーボは、DCモータ、減速器(ギア)、ポテンショメータ(角度センサー)、制御回路が小さなパッケージに入っており、誰でも簡単にモータの角度制御ができます。当初はラジコンのステアリング制御などで使われていましたが、現在はホビー用の2足歩行ロボットで多く使われているようです。
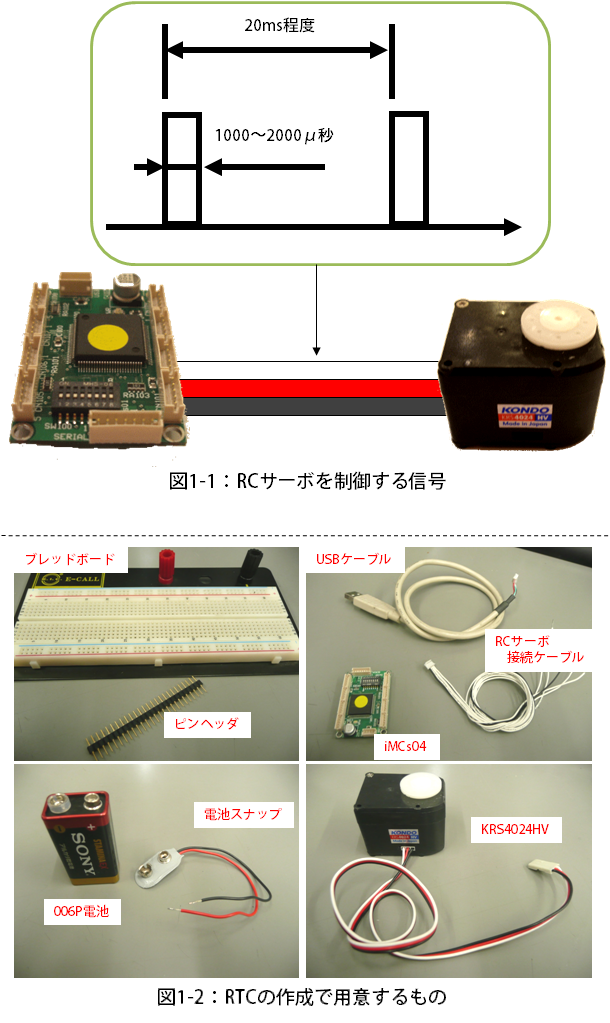
一般的なRCサーボからは、黒・赤・白の3本の線が出ています。それぞれの線は、黒がGND、赤が電源、白がサーボ指令です。指令はデジタル信号で約20msおきに送信される1000~2000usほどのパルス幅で、この白線のパルス信号幅に比例した角度に制御されます(図1-1)。角度とパルス幅の関係はRCサーボのメーカーによって若干異なるので、ご自身でチューニングを行う必要があります。
さて、この白線に流すパルス信号幅をPC単体で制御するのは難しく、一般的には専用のボードやマイコンを使って自作します。近年ではホビーロボット用のデバイスが各メーカーから発売されています。
RCサーボモータ制御ボード「iMCs04」
今回は専用のボードとして、株式会社iXs Research(http://www.ixs.co.jp/)の「iMCs04」を紹介します。
iMCs04はUSBでPCと接続でき、同時に4つのRCサーボを制御することができます。またアナログ入力端子があるので、PSD(赤外線距離センサー)などのセンサーをつないで環境情報を取得することも可能です。
それでは、このiMCs04を使ってRCサーボを制御できるRTCを作りましょう。今回はRCサーボとiMCs04を使った実機でのテストを行うために、ケーブルの接続などの手作業が必要になりますが、試作用のブレッドボードを使い、作業量を最小限に抑えています。ロボットを製作するときには必要な作業ですので、ぜひ参考にしていただければと思います。
用意するものは以下のとおりです(図1-2)。かっこ内は私が実際に購入した・または購入可能なお店ですので、参考にしてください。
1)iMCs04(iXs Researchで直接購入)
2)iMCs04用USBケーブル USB_A-ZH4-60cm(iXs Researchで直接購入)
3)iMCs04用サーボとの接続ケーブル ZH5-single-40cm(iXs Researchで直接購入)
4)ブレッドボードとピンヘッダ(1列のもの)(秋月電子などで購入)
5)サーボモータ(近藤科学KRS4024HV、iXs Researchで購入。他社製サーボでも代用可)
6)電池(006P型)・電池スナップ
7)ワイヤストリッパ(あると便利)
iMCs04と専用のケーブル、RCサーボはiXs Researchのサイト(http://www.ixs.co.jp)から購入が可能です。
RCサーボ「KRS4024」はロボット用の高性能サーボですので、他社より安価な製品でもPWM制御方式対応のものならば代用が可能です。その際は、電源の電圧を確認して、対応する電圧が生成できるように電源の構成を変更する必要があります。例えば4.8V用のサーボであれば、単3型充電型電池(1.2V)を4本、直列につないだ構成が良いでしょう。
ブレッドボードはハンダ付けなしで回路の試作ができる便利な道具です。ピンヘッダはブレッドボード上で配線を行う際に利用します。
ワイヤストリッパは、ケーブルの被覆(ゴムのカバー)をはがすときに使います。ニッパーなどでもできますが、あると便利な工具です。
ブレッドボードやジャンパー線、ピンヘッダ、電池スナップ、ワイヤストリッパは一般的な電子工作グッズが購入可能なお店で購入できます。秋葉原の秋月電子通商やマルツパーツ館、千石電商などが有名です。ネット通販でも購入できます。
※購入可能店舗の情報は、2009年6月現在のものです。
- この記事のキーワード
この記事をシェアしてください
関連記事
バックナンバー
この記事の筆者

筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
