文系女子の「ETロボコンで組み込みデビュー」
第6回
実際に難所を攻略してみよう!!
実際に難所を攻略してみよう!!
- [舟元] 灰色を検出したら、難所処理を始めれば良いってことが分かったね。システムの全体を考えると難しいけど、灰色の検出方法、難所を攻略する方法を別に考えたら分かりやすくない?
- [吉田] 問題領域を限定して考えるんだね。なるほど。
- [舟元] そうそう、全体を見渡したり、ポイントを絞って考えたりすると良いね。ここでは、難所の一つ「ルックアップゲート」の攻略をチャレンジしてみよう。
- [吉田] ルックアップゲートって、通過するだけで良いんでしょ?簡単じゃん!!
- [舟元] いやいや、よく見てよ。
- [吉田] あわわ。立ったままじゃ通り抜けられないじゃん!!
- [舟元] 素通りできたら、難所じゃないよね。
| 測定箇所 | 高さ |
|---|---|
| 走行体の全高 | 255mm |
| ゲートの高さ | 235mm |
- [吉田] 2センチかぁ、そりゃ通れんわぁ。どうしよう。走行体縮まないよね。
- [舟元] そうだねー。こんな感じで攻略するのは、どう?
|
|
| 図4:走行体が後傾して走破するところ |
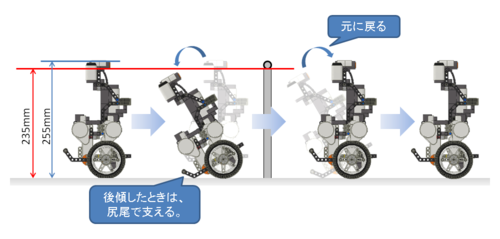
- [吉田] お、イケそう。。。けど、一回倒れて、また復帰なんてできるの?
- [舟元] んー、どうだろう。試してみないと分からないよね。
- [吉田] まずは、尻尾で支えて走れるのかをやってみよっかな。後傾した走行体を尻尾で支えながら前進できればOKだね。モーターって何もしないと、フニャフニャ回っちゃうけどどうしたら固定できるかなー。できれば、指定する角度とかで止まってくれうと嬉しいな。
- [舟元] ECRobotのモータ制御API には、ブレーキモードってのがあるよ。
- この記事のキーワード
バックナンバー
この記事の筆者


筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
