ハイスピードバトル! 競技の模様
ハイスピードバトル! 競技の模様
|
|
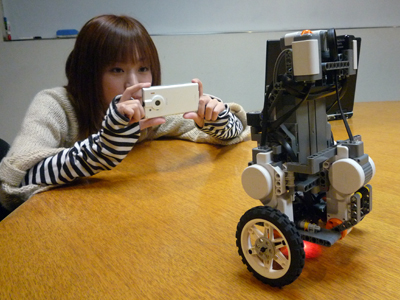
ETロボコンでは何年かに一度、ブレークスルー的な要素が現れます。今年がまさにその年だったと思います。「しっぽ走行」です。 今年の走行体は「しっぽ」があるのですが(図1参照)、「しっぽ走行」は、そのしっぽを接地したまま走行する方法です。 今回、チャンピオンシップ大会での力走を見て、私たちでもその威力を検証してみました。
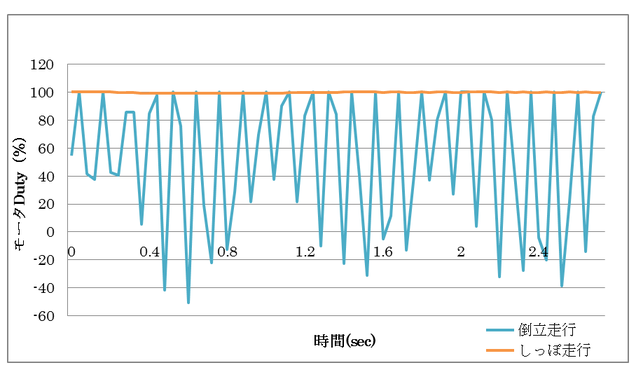
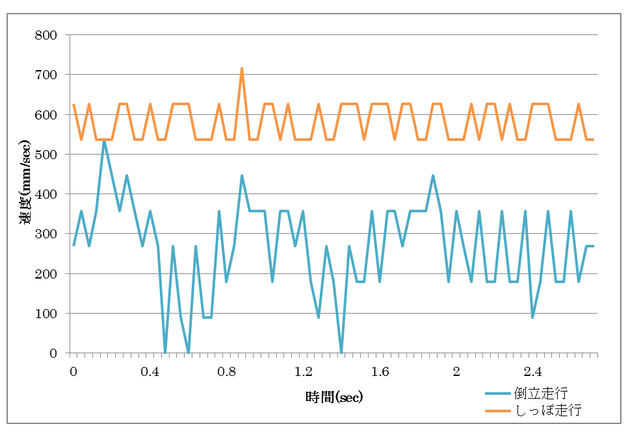
しっぽ走行の場合、しっぽを接地することで倒立振子させる必要がなくなります。 そのため、モータの出力を倒立用に振り分ける必要がなくなり、ライントレースのみに集中させることが出来ます。 その結果、走行スピードが速くなります。図2にモータへ出力するDuty値の倒立振子、しっぽ走行それぞれの結果を、図3には走行体の前進速度の結果を示します。
図2から分かるように、しっぽ走行ではモータへのDuty値は常に100%(マイナス値はモータ逆転を表します)であるのに対して、 倒立振子ではバランスを取らなければならないのでDuty値が絶えず変化しているのが分かります。
その結果、前進速度もしっぽ走行の平均速度が580mm/secに対して、倒立振子では276mm/secとなっています。
|
|
| 図1:今年の走行体のしっぽ(クリックで拡大) |

|
|
| 図2:Duty値の比較(クリックで拡大) |
|
|
| 図3:速度の比較(クリックで拡大) |
【動画】実際の走行の違い。
- [舟元] さて、競技、紹介していくね。
- [吉田] 期待してるよ!
- [舟元] 競技はこれが全国レベルなのか!と興奮するぐらいのハイレベルなレースで、上位チームは-15秒以下だったよ。
- [吉田] 15秒!?しっぽ走行無双ってこと?
- [舟元] だねー!しっぽ走行でベーシックコース20秒台前半を記録するチームが多かったよ。
- [吉田] 私たちのチームでは、倒立走行で35秒ぐらいだったよね?でも、実際しっぽ走行でコースを走らせるとスピードが出過ぎて難しそうなりー??
- [舟元] うーん。確かに、スピードが出すぎてカーブが曲がりきれないとか、PIDのパラメータ調整なんかも難しいかもね。 これは実際にライントレースさせて見ないとわからないな。
- [吉田] ところでこれ、ルール違反にならないんだっけ?
- [舟元] ルールでは走行中のしっぽ走行を禁止していないから大丈夫だよ。
- [吉田] (「だよ。」とか言うんなら地区大会前に言ってよね。)競技規約で決められた制限をしっかり理解しないとね。 ルール違反だと思って、他にも取り組めていないことが多いかも。 しっぽ走行はすごく効果的だから、北陸地区リベンジマッチで挑戦してみたい!
- [舟元] 難所では、ETタックルの挑戦方法が、色々なバリエーションがあっておもしろかったよ。 真ん中からペットボトルを探したり、雑巾がけのようにETタックルのフィールドの隅から隅まで走行してペットボトルを探したり、 まさに十人十色といった感じだった。
- [吉田] 私たちもETタックルの走行方法を検討するときは、色々な案が出たもんね。実際、何通りぐらいあったの?
- [舟元] 詳しく各チームのモデルを見れば、ふるまいの部分でどんな走行方法だったのか詳しくわかるよ。 モデルだけでもどんな走行をしていたのか、どんな検討がされていたのか調べられるから、ぜひ読んでみよう!てか、読んで!
大会の結果
- [舟元] 最後に表彰式の模様、レポートするね。入賞チーム情報は ETロボコン公式ページ に載ってるから見てね。参考までに、競技部門の優勝チームの走行タイムはなんとインコース-18.9秒、アウトコース-18.6秒!
- [吉田] はやっ!?
- [舟元] しっぽ走行して、さらに難所全て成功してるからね。とても綺麗な走りだった。
- [舟元] そしてモデル上位のチームの評価理由は、「妥当性のある取り組みがされている」という点と 「各モデル間のトレーサビリティが取れている」という点が高評価に繋がってた。
- [吉田] トレーサビリティは地区大会でもポイントになってたね。 結論を出すにあたって、どんな分析が行われていたか分かるモデルが良い評価をもらえるということだよね?
- [舟元] そうそう。さらに上位チームは、アイコンを使うなどして、視覚的にトレーサビリティが分かるような工夫がされていたよ。 読みやすさも重要な評価ポイントなんだね。
- [吉田] なるほど!来年はこれらの点を気をつけて、高評価狙いましょう!ところで北陸地区代表はどうだった?
- [舟元] NECソフトウェア北陸チームは特別賞のTOPPERS賞を受賞していたよ。 マルチタスクOSのタスクスケジューリングの設計方法とSPINという検証ツールを使った開発が受賞の理由とのことでした。
- [吉田] 北陸の誇りだね!さすが古豪チーム!
ETロボコンに参加して学んだこと
- [吉田] チャンピオンシップ大会も終わって、2011年のETロボコンも終わりだね。 業務外の時間を使った活動だったから大変な時もあったけど、開発プロセスやモデリングに、要素技術…本当に勉強になったなぁ。
- [舟元] ホントそう思う。全国のレベルの高さも身にしみた。
- [吉田] 地区大会では、ETロボコンに参加されている北陸の企業の方や、学校の先生、学生さんと交流できて、人の輪も広がったよ。懇親会での情報交換も楽しかった。
- [舟元] うんうん。チャンピオンシップ大会に出場できたらもっと広がっただろうね。
- [吉田] 無念じゃ・・・。来年はもっと頑張りたい。
- [舟元] うん。スキルを磨いて頑張りたい。
- [吉田] さて、今回でこの連載も最終回です。文系でプログラミングもしたことも無かった私だったけど、モノを動かす楽しさ、モデリングや難所攻略など考える楽しさを教えてもらいました。更に色々出来るようになって来年は大きくなって帰ってきたいと思います。半年間ありがとうございました。
- [舟元] 自分も来年こそはチャンピオンシップ大会に出られるように頑張ります!半年間ありがとうございました。
【編集部より】図2と図3の画像が同じだったため、修正しました。(2011.12.27)
バックナンバー
この記事の筆者


筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
