プログラムの構造をモデル図で表す
プログラムの構造をモデル図で表す
前のページで、プログラマーの頭の中にあった「ロボットをどのように動作させるのか」という知識や意図を「プログラムが表現する知識」に変える方法について説明しました。
しかし、プログラミングのときに別々のプログラマーがこの作業をすると、それぞれのやり方によって差ができてしまいます。ここは、プログラマー同士が仕事を始める前に、意図と処理の関係づけを済ませておくのが良いでしょう。
こういう目的には図を使うとわかりやすいですよね。図は写真とは異なり、ひとつの図の中に多くのことを表現することはできません。しかしその反面、重要な部分を強調し、そうでない部分を割愛することに向いている表現方法なのです。
第2回のプログラムで私たちがやりたかったことは次のようなことでした。
A)走行するときはラインに沿って走る(ライントレースする)
B)停止中にバンパが押されたら走行する
C)走行中にバンパが押されたら停止する
これを元にロボットの動作を単一の動作に分けてみると、次のようになります。
・走行する
・停止する
・バンパが押されたかどうか調べる
・ライン上にいるかどうか調べる
・停止中か走行中かで処理を分ける
「バンパが押されたか」とか「ライン上にいるか」といったことを調べる処理がありますね。これらは「ロボットの動作」のうち、タッチセンサーの処理を「バンパ」というユニットに、光センサーの処理を「ライン監視部」のようなユニットに任せるということを示唆しています。このことを図にすると次のようになります。
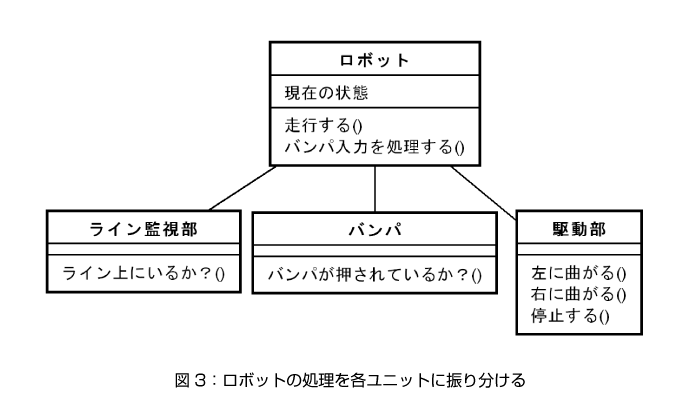
クラス図を使ってロボットの構造を考える
この図を描くのに使っている記法を、UML(Unified Modeling Language:統一モデリング言語)といいます。この記事はUMLの使い方を解説するのが目的ではないので、ここは単純な描き方だけで済ませます。UMLの詳しい使い方を知りたい方は、OMG(Object Management Group)がUMLに関連する情報を集めているウェブサイト「UML(R) Resource Page」(http://www.uml.org/)をご覧ください。
上のような図をクラス図といいます。「ロボット」という四角いシンボルがクラスを表しています。「ロボット」クラスには、「ロボットがすること」をまとめてあります。ほかにも、状態を保持する「現在の状態」という変数も追加しましたが、これについては次回説明します。
次に、ロボットの走り方を処理する関数を「駆動部」クラスにまとめました。それぞれの関数の中にはモーターを使って走る方法を書くことになります。バンパやラインの状況を調べる処理は、それぞれ「バンパ」クラスと「ライン監視部」クラスにまとめました。
クラスとクラスの間に引いてある線を関連といいます。「ロボット」クラスは「バンパ」「ライン監視部」「駆動部」と関連を持っています。これは、「ロボット」クラスがこれらのクラスの関数を呼び出して自分の動作を記述することを表現しています。
このように、クラス図を眺めてみると、プログラムがどのような構成要素でできていて、どんな関係を持っているのかがわかりますね。そのことから、クラス図は「構造を表す図」と言われています。
今回は、プログラマーの頭の中の知識や意図をプログラムに反映するために、UMLのクラス図を使って構造を表す方法を紹介しました。
次回は、モデル図に合わせてプログラムを作成する方法を紹介します。また、モデリングの学習にロボコンを活用する取り組みについても紹介する予定です。お楽しみに。
- この記事のキーワード
バックナンバー
この記事の筆者

筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
