夢のミニ四駆を作る前に、これまでのミニ四駆について学ぼう

KINECTミニ四駆
最後に、FULLER株式会社で作ったKINECTミニ四駆を解体しながら紹介します。
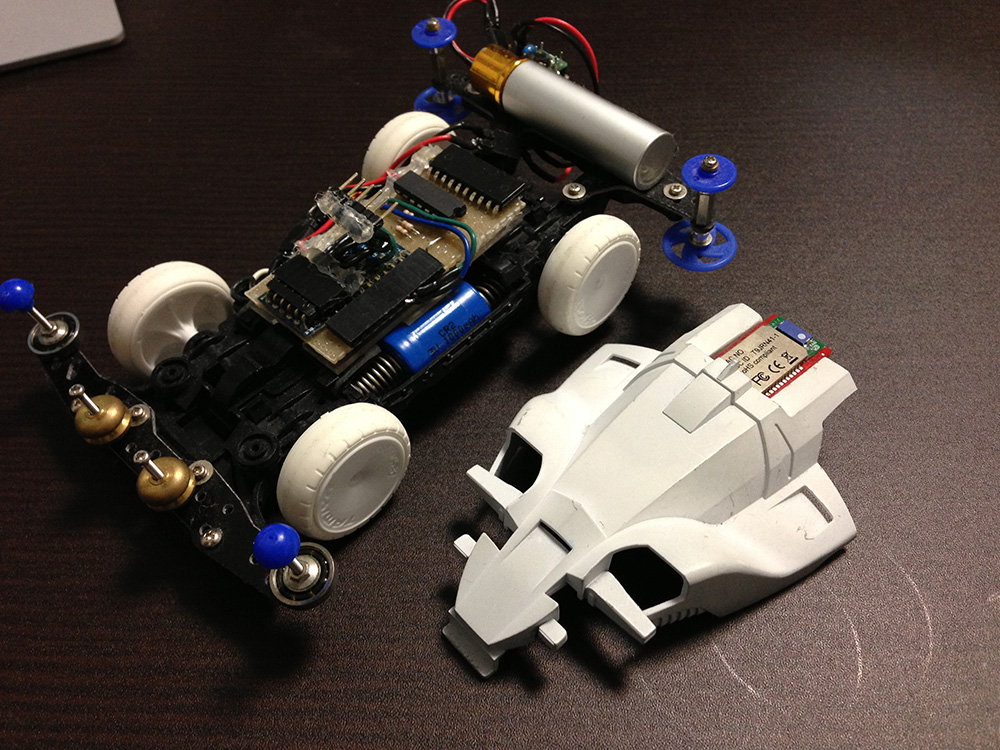
まず、車体はミニ四駆PROのスーパーエンペラーを使用しています。先ほど紹介した低摩擦プラローラーセットを使用し、FRPフロントワイドステーを付けるなどしてカスタマイズしました。上部に見えるのは、Bluetoothモジュールです。搭載スペースを稼ぐためにこの位置に取り付けられていますが、思ったよりカッコイイ外観になりました。
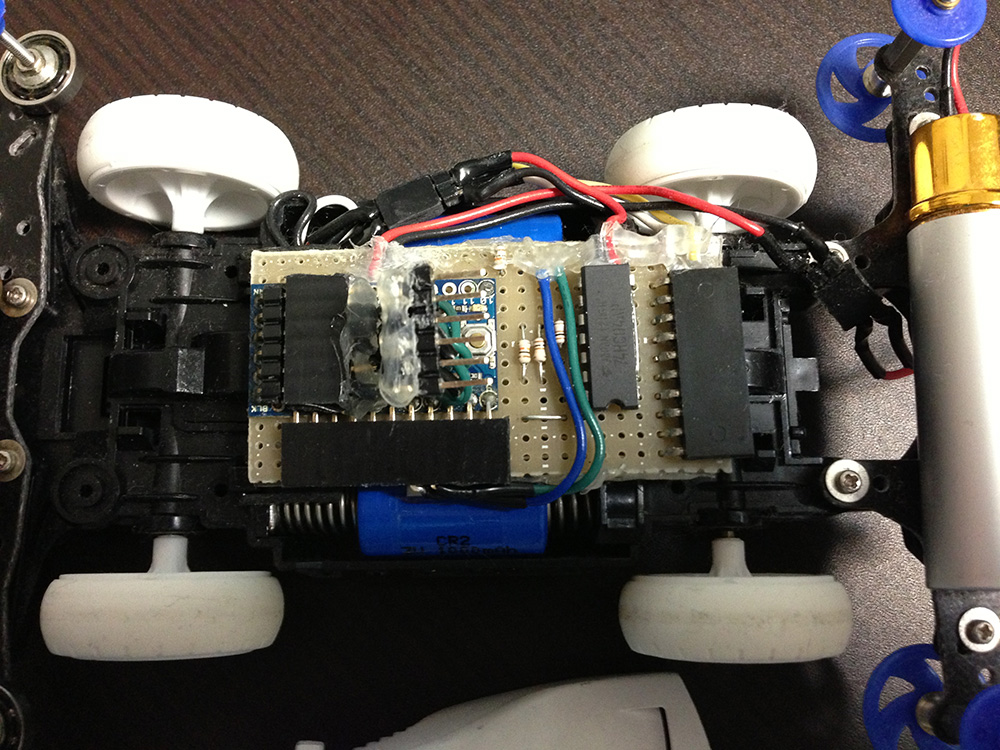
中にはArduino Pro MiniとHブリッジ回路が搭載されています。ユニバーサル基板に全てまとめて取り付けてあります。回路の接地面はバッテリーホルダーを利用して作りました。
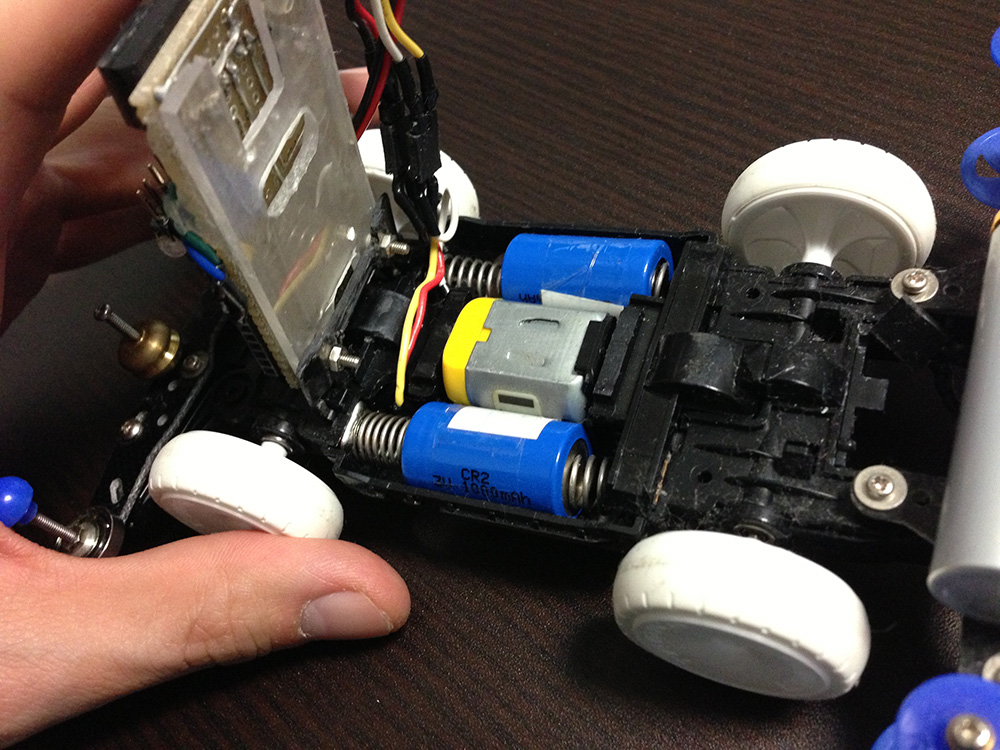
Hブリッジを介すると電圧降下するため、ミニ四駆のスピードが遅くなります。そのため、通常の単三アルカリ電池でなく、カメラ用のリチウム電池を使用しています。このリチウムと単三のサイズ差を埋めるために、スプリングが挟まっています。
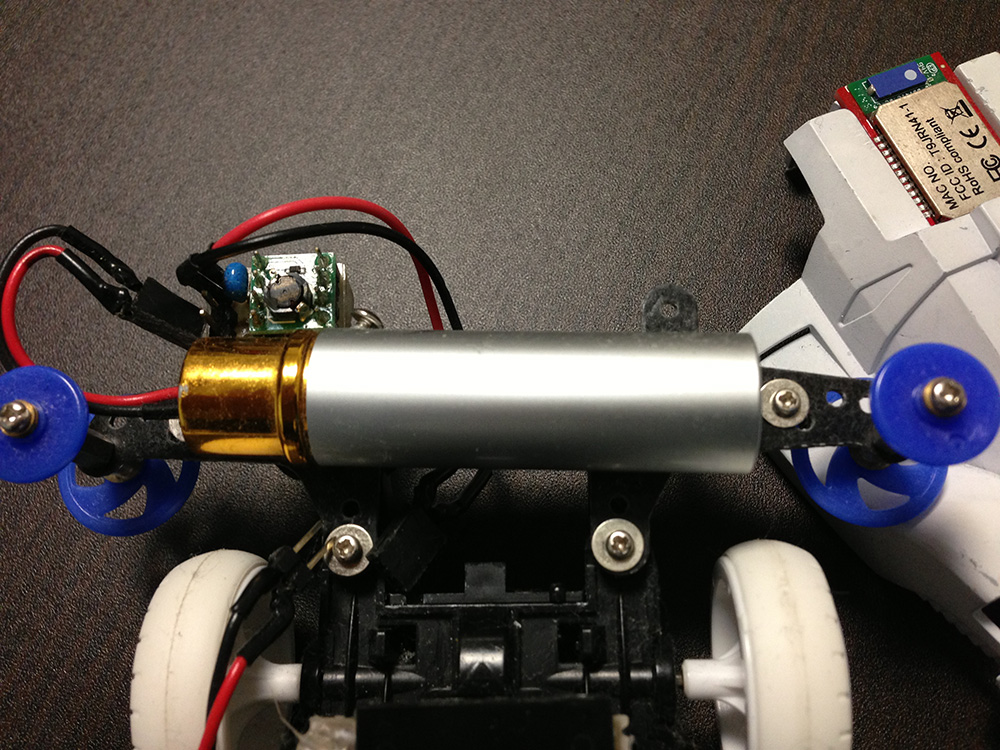
後ろにはArduino Pro Mini用の単四バッテリーとDC-DCコンバータが搭載されています。
KINECTミニ四駆は次のような構成を取っています。
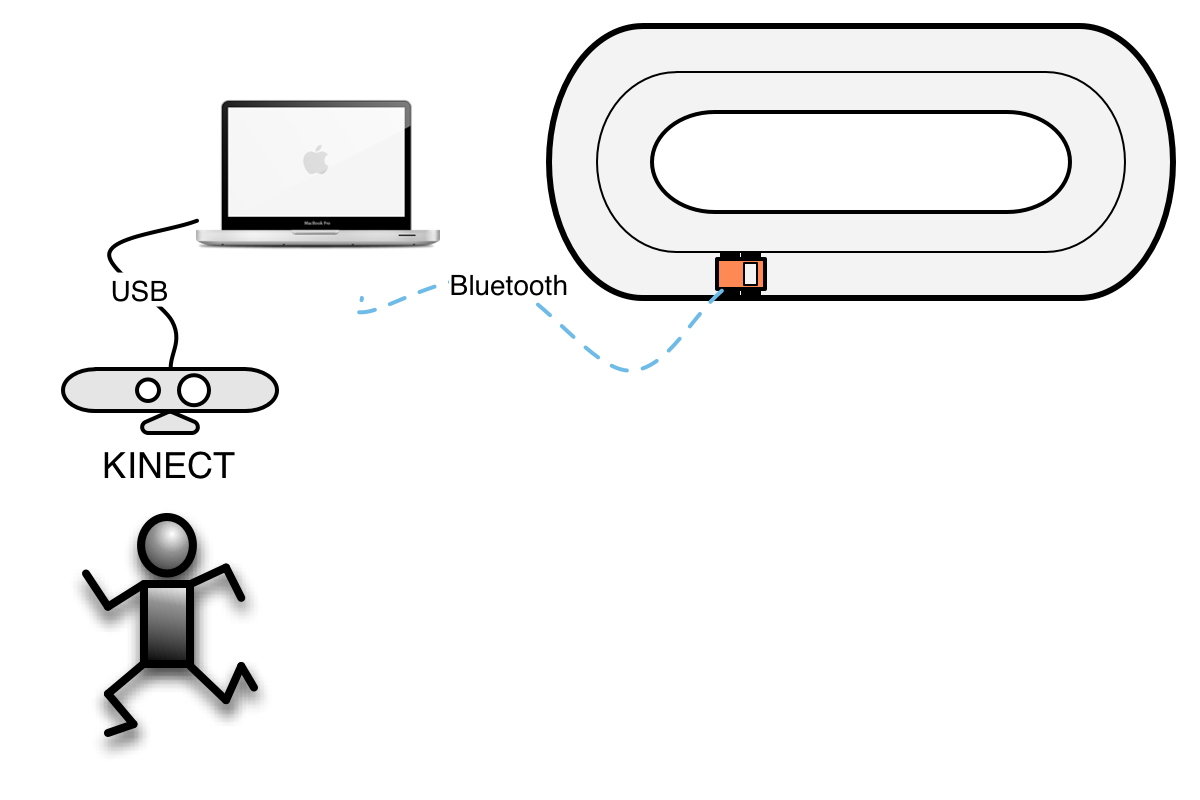
- MacBookにKINECTを繋ぎ、KINECTから信号を受ける
- その信号をミニ四駆制御用のコマンドに変換
- 変換したコマンドをMacBookに搭載されたBluetooth経由で送信
KINECTとミニ四駆は完全に独立しているため、ミニ四駆に対して直接コマンドを送ることも可能です。
プログラムはGithubでオープンソースとして公開しています。このソースコードを読むことで、どのようにコマンドが定義されているかがわかります。
> mini4wd_motor_drive
これからの連載の予習として御覧ください。
連載で作るミニ四駆
この連載では、先ほど述べたようにミニ四駆REVをベースに改造します。KINECTミニ四駆は、なかなか複雑な構造になってしまったのですが、この連載で作るミニ四駆は、同じ性能を持ちつつ、より簡素な作りにします。
具体的には、ミニ四駆REVにArduino Mini Pro、Bluetoothモジュール、Hブリッジ回路を組み込み、実際に走るところまでを解説します。
次回からはArduinoの基本的な使い方から始まり、プロトタイプから完成品になるまでの一連の流れを紹介していきます。必要な工具やパーツは、各連載の中でリストアップしますので、記事が公開されたら、必要な工具をお店で買い、週末に作る、という流れで読み進めて頂ければ幸いです。
(編集部より:記事は毎週月曜日もしくは火曜日に公開する予定です。)
また、この連載を読むことで、Arduinoを使った電子工作の流れが具体的に理解できます。自分の作りたいものが出来た時に、この経験を活かせるはずです。
この連載ではKINECTのプログラムには触れません。作るのはあくまで、電子部品を組み込んだミニ四駆本体のみです。しかし、ミニ四駆さえ出来てしまえば、コマンドラインから操作したり、Webサーバ経由で操作することも可能です。
是非、皆さんの想像力で、面白おかしくミニ四駆を走らせてください。