ミニ四駆の改良と基礎的なプログラミングに挑戦する
前回から少し時間が空きましたが、この連載もいよいよ今回が最終回となります。これまで、ひと通りミニ四駆が完成するまでを解説してきましたが、皆さんのミニ四駆は完成しましたか?興味がある方、これからやってみたい、という方は、以下から連載記事をご覧になってください。→ ミニ四駆×Arduino×Bluet
2013年5月15日 20:00
前回から少し時間が空きましたが、この連載もいよいよ今回が最終回となります。これまで、ひと通りミニ四駆が完成するまでを解説してきましたが、皆さんのミニ四駆は完成しましたか?
興味がある方、これからやってみたい、という方は、以下から連載記事をご覧になってください。
→ ミニ四駆×Arduino×Bluetoothで“夢のミニ四駆”を作ろう
さて最終回では、Fuller, Inc.で作ったミニ四駆を解説しながら、前回で完成したミニ四駆の改良案を考えていきます。その後、ミニ四駆をPythonで動かす方法を解説しながら、ミニ四駆のクライアントアプリ作成の基礎を解説します。
Fuller, Inc.のミニ四駆
Fuller, Inc.で作ったミニ四駆を回路とプログラムの両面から解説していきます。最初に紹介するボディ編では、入出力ピンと速度を上げるアイデアを紹介します。次にプログラム編では、速度制御を行うアイデアを紹介します。
FULLERミニ四駆 ボディ編
今回作るミニ四駆は「ミニ四駆PRO」をベースとしたものです。
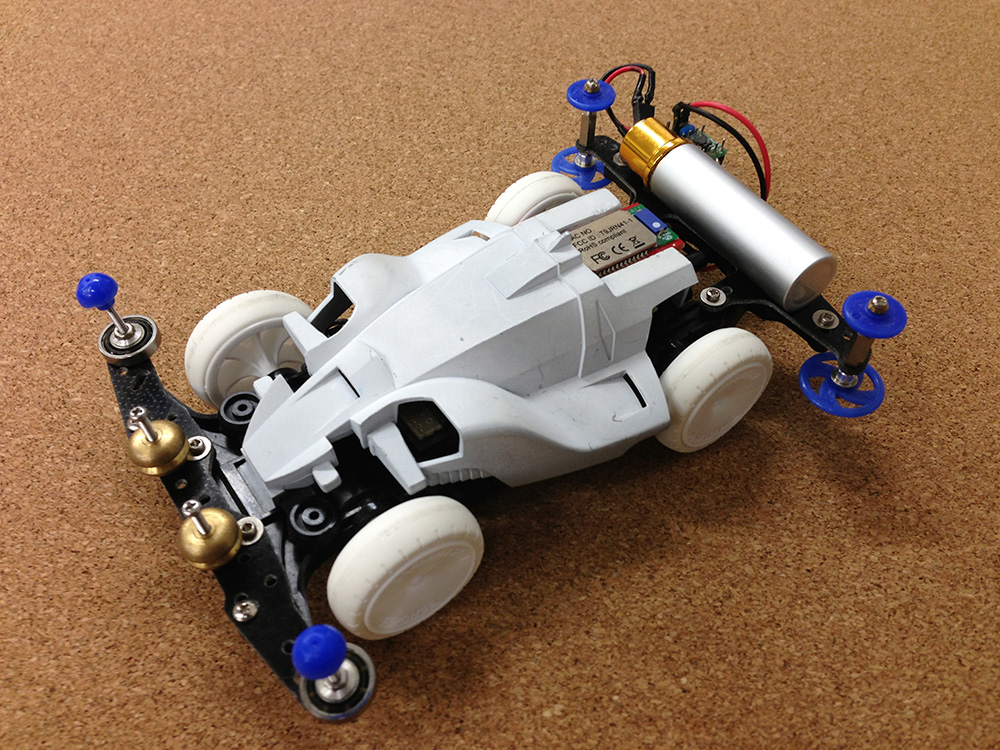
エアロアバンテをベースとしたミニ四駆と違い、シャーシにかなり手を入れています。
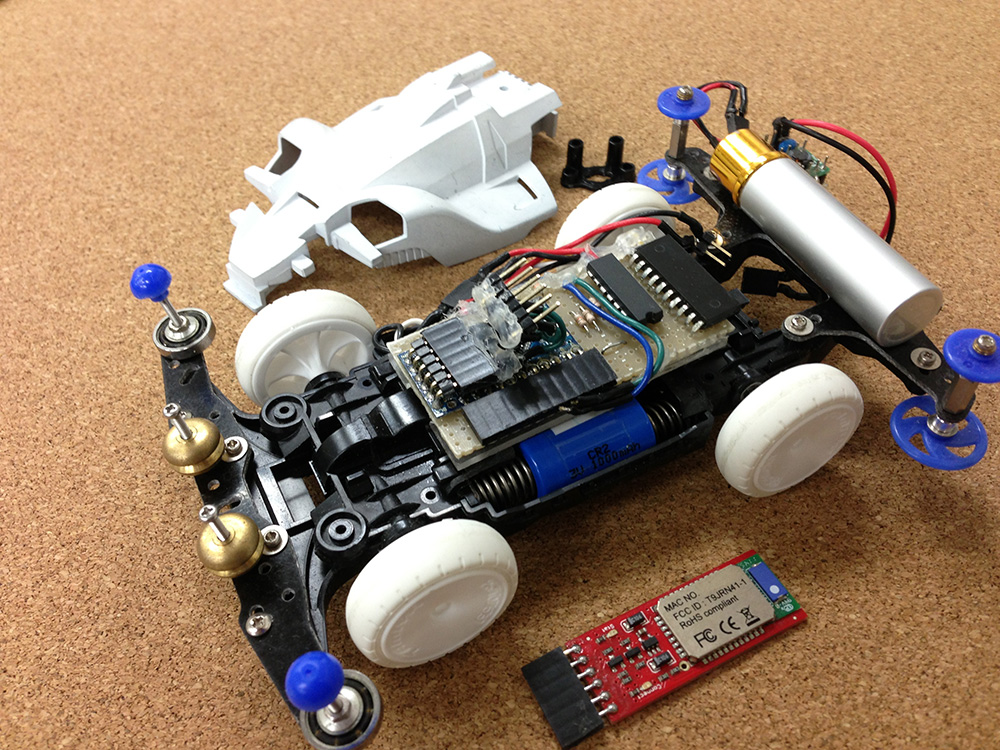
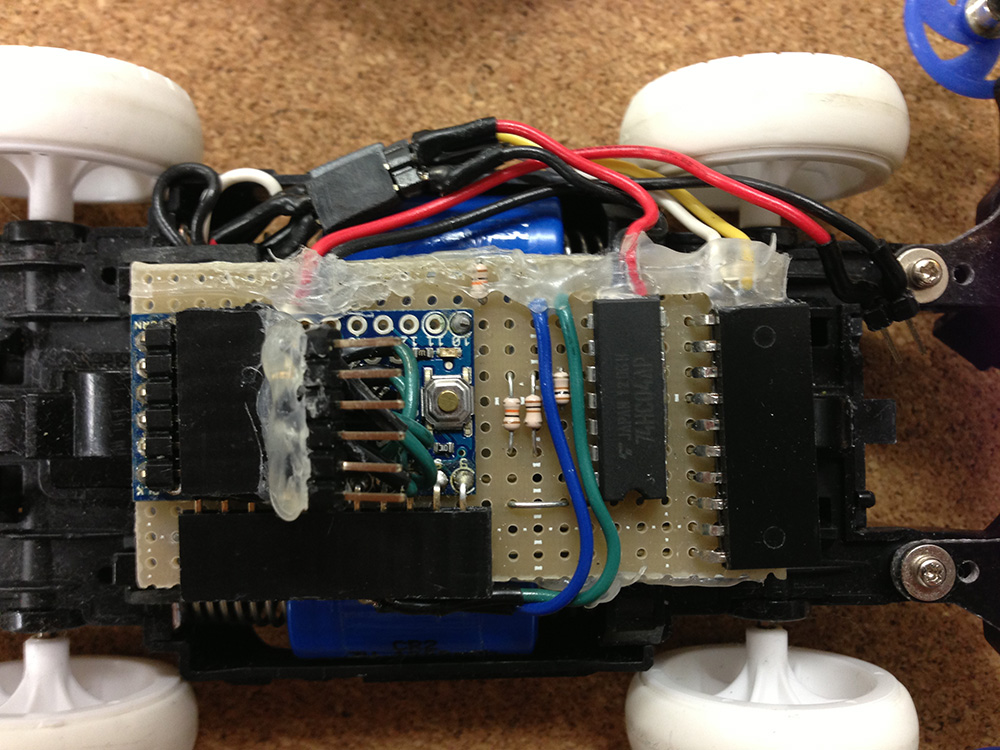
この回路自体は、前回解説したものとほとんど同じです。ただし、NOT回路を別に積んであり、2本の制御ピンで制御できます。このアイデアは今回製作したミニ四駆にも使用できますが、スペース的に難しいものがあります。センサー等を積み込む必要があり、たくさんの入出力ピンが必要になるまで、NOT回路は積む必要はないと思います。
その他の大きな特徴として、単三電池の代わりに3Vのリチウム電池が積んであります。このミニ四駆はArduino駆動のための単四電池を別途積んでしまったため、普通の単三電池ではスピードが出ませんでした。そのため、リチウム電池を使い、電圧を上げて対処しています。

このリチウム電池の案は、今回の連載で製作したミニ四駆にも使うことができます。ただし、スペーサの作製等、かなり工数が必要です。これを楽にする方法として、単三形のリチウム電池を使うアイデアがあります。

TrustFireは単三電池の大きさにもかかわらず、1個3.7Vの電圧が得られます。簡単にミニ四駆へ搭載できれば良いのですが、筆者が試したところ、若干サイズオーバーでした。使用するためにはシャーシの加工が必要です。
その他には、カメラ用のリチウム電池CR-V3をバラす方法があります。筆者はこの方法は試していないので、自己責任でお願いします。"CR-V3 分解"で検索すると情報がいくつかヒットしますが、TrustFireのようにサイズオーバーの可能性もあります。
最後に、このリチウム電池も、TrustFireもそうなのですが、電圧が2本で5Vを超えます。今回使用しているDC-DCコンバータは昇圧専用のモジュールです。5Vを超える電圧を使いたい場合、次の降圧型のコンバータに変更する必要があります。
> TPS63060 可変型昇降圧DC-DCコンバータモジュール(2.5V〜8V)
ちなみに、FETモジュールは24Vまで対応しているので、そのまま使用することができます。
この記事をシェアしてください
関連記事
バックナンバー
この記事の筆者
筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
