プロトタイプ(3) コマンド送信のBluetooth化
プロトタイプ(3) コマンド送信のBluetooth化
続いて、USB経由で送信していたコマンドをBluetooth経由で送信できるように変更します。行うことは基本的に、「Arduinoを始めよう!(3)Bluetooth編」と同様です。第5回の内容を覚えていれば、簡単にコマンド送信をBluetooth化できるはずです。
プログラムの変更点は、シリアル通信の転送速度の1箇所のみです。
/**
* ピンの定義
*
* signal1とsignal2で使用するピンに名前を付ける。
*/
const int SIGNAL1_1 = 12;
const int SIGNAL1_2 = 13;
const int SIGNAL2_1 = 10;
const int SIGNAL2_2 = 11;
/**
* 転送速度の定義
*/
const int SERIAL_TRANS = 115200;
/**
* setup関数
*
* シリアル通信を使うため、初期化する。
* モーターの制御に使用するピンをOUTPUTに指定する。
*/
void setup() {
Serial.begin(SERIAL_TRANS);
pinMode(SIGNAL2_1, OUTPUT);
pinMode(SIGNAL2_1, OUTPUT);
pinMode(SIGNAL1_1, OUTPUT);
pinMode(SIGNAL1_2, OUTPUT);
}
/**
* signal1関数
*
* モーターの制御をわかりやすくするため、シグナル関数を用意する。
* signal1関数とsignal2関数を使って、モーターの正転、逆転、停止を制御する。
*
* signal1関数とsignal2関数に同時に1を渡すと、FETモジュールが壊れるので注意する。
*/
void signal1(int value) {
switch (value) {
case 0:
digitalWrite(SIGNAL1_1, HIGH);
digitalWrite(SIGNAL1_2, LOW);
break;
case 1:
digitalWrite(SIGNAL1_1, LOW);
digitalWrite(SIGNAL1_2, HIGH);
break;
}
}
/**
* signal2関数
*
* モーターの制御をわかりやすくするため、シグナル関数を用意する。
* signal1関数とsignal2関数を使って、モーターの正転、逆転、停止を制御する。
*
* signal1関数とsignal2関数に同時に1を渡すと、FETモジュールが壊れるので注意する。
*/
void signal2(int value) {
switch (value) {
case 0:
digitalWrite(SIGNAL2_1, HIGH);
digitalWrite(SIGNAL2_2, LOW);
break;
case 1:
digitalWrite(SIGNAL2_1, LOW);
digitalWrite(SIGNAL2_2, HIGH);
break;
}
}
/**
* stop関数
*
* 停止コマンドが来た場合のステータスの変更を行う。
*/
void stop() {
signal1(0);
signal2(0);
}
/**
* forward関数
*
* 前進コマンドが来た場合のステータスの変更を行う。
*/
void forward() {
signal1(1);
signal2(0);
}
/**
* back関数
*
* 後退コマンドが来た場合のステータスの変更を行う。
*/
void back() {
signal1(0);
signal2(1);
}
/**
* loop関数
*
* コマンドを受け取り、forward / back / stop のいずれかの適切な関数を呼ぶ。
*/
void loop() {
if (Serial.available() > 0) {
char c = Serial.read();
if (c == 'f') {
forward();
} else if (c == 'b') {
back();
} else if (c == 's') {
stop();
}
}
}
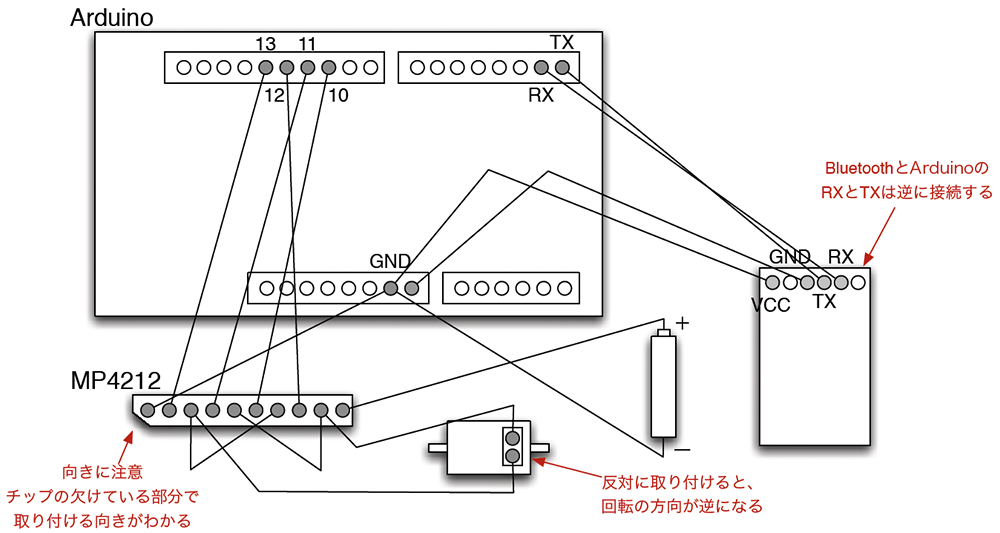
この変更を加えたら、プログラムを転送します。その後、一度USBケーブルを抜き、BluetoothモジュールとArduino UNOのRXとTXをつなぎます。USBケーブルを抜く前に、DCアダプタをArduinoに指しておいてください。

回路が完成したら、リセットボタンを押します。リセットボタンを押すことで、プログラムが初期化されます。
「Arduinoを始めよう!(2)モーター制御編」を参考に、BluetoothとArduinoを接続します。このプロトタイプは、ターミナルからコマンドを送信し、モーターが期待通りに回れば、正常に動いています。コマンドとモーターの挙動は、プロトタイプ(2)と同様です。
これで、ミニ四駆のプロトタイプが完成しました。ミニ四駆を一度も触っていませんが、電源周りを少し変更し、これらをうまくミニ四駆に搭載すれば、Bluetoothでミニ四駆が制御できます。
前回の課題の解答
実は今回のプロトタイプ(3)が課題の模範解答になっています。可能ならばこのプログラムを参考に、自身のプログラムをわかりやすく書き換えてみてください。
今回の課題
Arduino Pro Miniについて、調べてください。特に、Arduino UNOと異なる点を把握しておいてください。
おわりに
今回はArduinoで電子工作する場合に良く行う、プロトタイプの作り方を紹介しました。
ArduinoはAndroidやiPhoneなどのアプリケーションと比べてやれることが少ないため、プログラムも必然的に短くなります。しかし、プログラムの他に回路を含めて、デバッグする必要があるため、バグが発生した場合に、特定するのが困難です。
そこで、段階を踏んでプロトタイプを組んでいく必要があります。この工程を踏むことで、バグの原因の特定が容易になります。Arduinoを使った開発に慣れるまでは、一つずつできることを増やしていってください。
次回は、Arduino UNOをArduino Pro Miniに置き換えます。さらに、DCアダプタを切り離し、電池で単独駆動するところまでを目指します。これができてしまえば、ミニ四駆に載せるのはさほど難しくありません。夢のミニ四駆を一緒に作っていきましょう。
【参考リンク】
バックナンバー
この記事の筆者
筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
