ロボット開発にフル活用するRTミドルウエア
第4回
iMCs04とRCサーボを配線
iMCs04とRCサーボを配線
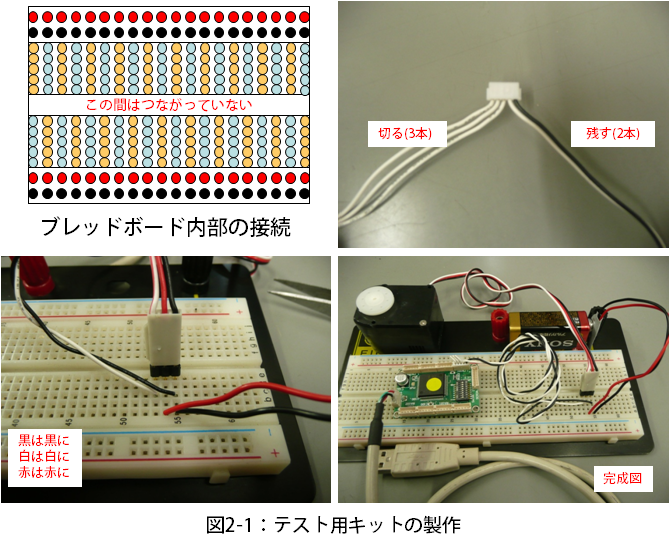
iMCs04とRCサーボ、そして電源を接続します。配線はブレッドボードを使います。ブレッドボードは図2-1のように、両サイドの2列と、各行の5穴が内部でつながっています。
RCサーボはピンヘッダを3つに折ってRCサーボのコネクタに挿し、3行にまたがるようにブレッドボードとつなぎます。
iMCs04はUSBケーブルを接続したら、RCサーボとの接続ケーブルをちょっとだけ加工します。このケーブルは、0番(黒)と1番(白)しか使わないので、残りは切除します。次に先端をワイヤストリッパでむき、ブレッドボード上のサーボと接続します。このとき接続ケーブルの白線はRCサーボの白線、黒線は黒線と同じ色同士でつなぎます。そしてiMCs04のCN101コネクタに接続します。
電池スナップも先端をはいで、黒は黒、赤は赤でつなぎます。
------------------------------------
| タグ | 項目1 | 項目2 | 設定値 | |||
|---|---|---|---|---|---|---|
| 基本 | RT-Component Basic Profile | Module name | iMCs04Control | |||
| Module vendor | あなたの名前 | |||||
| Execution Rate | 10 | |||||
| Output Project | iMCs04ControlCompProj | |||||
| データポート | RT-Component Data InPort Profile (Addボタンで入力ポートを追加) |
Port Name | in1 | in2 | in3 | in4 |
| Data Type | TimedFloat | |||||
| Var Name | in1 | in2 | in3 | in4 | ||
| Disp. Position | left | |||||
| 言語・環境 | C++ | OS | Windows | |||
図2-2:RTC Builderの設定
- この記事のキーワード
バックナンバー
この記事の筆者

筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
