3.2. 地区大会に向けた活動
3.2. 地区大会に向けた活動
3.2.1. 競技規約の確認
地区大会に向けて開発を始める前に、競技部門の競技規約を再確認しました。「競技規約なんて一度読んでおけば大丈夫でしょ?」と考える方もいらっしゃるかもしれませんが、この作業は決して軽視できません。
かくいう我々のチームも、前述の通りETロボコン2011にて、「インコースでは超音波センサのケーブルを抜くこと」という競技規約を重要視しておらず、敗退しました。超音波センサのケーブルを抜いた状態ではスタートできない実装をしたまま、本番に臨んでしまったのです。
さらに例年、競技規約には「抜け穴」が存在します。近年の最たる例としてはETロボコン2011での「尻尾走行」が挙げられます。これは「走行中に尻尾を接地してはならない」という文言が競技規約中に存在しなかったことで、一部のチームが採用した走行技術です。
このように、参加者にとって「都合の悪い規約」「都合の良い規約」を正しく認識し、対策したチームが勝利に大きく近づきます。そのため、我々のチームは全員で一文一文規約を確認しました。
今となっては定番の走行方法となりましたが、ETロボコン2011では競技規約の「抜け穴」を見抜いたチームだけが採用した新技術でした。
3.2.2. ハイブリッドライントレースの検証・実装
7月終盤から、我々のチームの走行戦略の核となる技術である「ハイブリッドライントレース」の実装・調整を行いました。ハイブリッドライントレースとは、いわゆる「まいまい式によるライントレース」と「自己位置推定(仮想ライントレース)」を融合した走行方法です。
2012年度は「ハイブリッドライントレース」で実際に走行できるようになるまで、かなりの時間を要しました。というのも、「ライントレース制御」と「自己位置推定制御」をどの比率で組み合わせるか、模索していたためです。ライントレース制御の比率を高くすると走行制御が間に合わずコースアウト。自己位置推定の比率を高くすると実際の位置とのズレが蓄積しコースアウト。一時、メンバー内でも「通常のライントレース制御に戻した方が良いのではないか・・・」と諦めかけていたほどです。
比率調整が無事終わると、次はコースの各区間の情報をプログラムしていきます。例えば、「スタートから坂道開始まで100cm」といった内容です。これも繰り返し走行させて、微調整します。今思うと、途方も無い回数、走行体を走行させました(この頃が一番大変だったかもしれません)。しかし、ハイブリッドライントレースを採用し、区間情報をプログラムし終えたことで、会場の明るさに対応するための調整が容易となりました。そのため、大会当日の走行調整を大幅短縮できました(大会当日、区間情報はほとんど変更していません)。
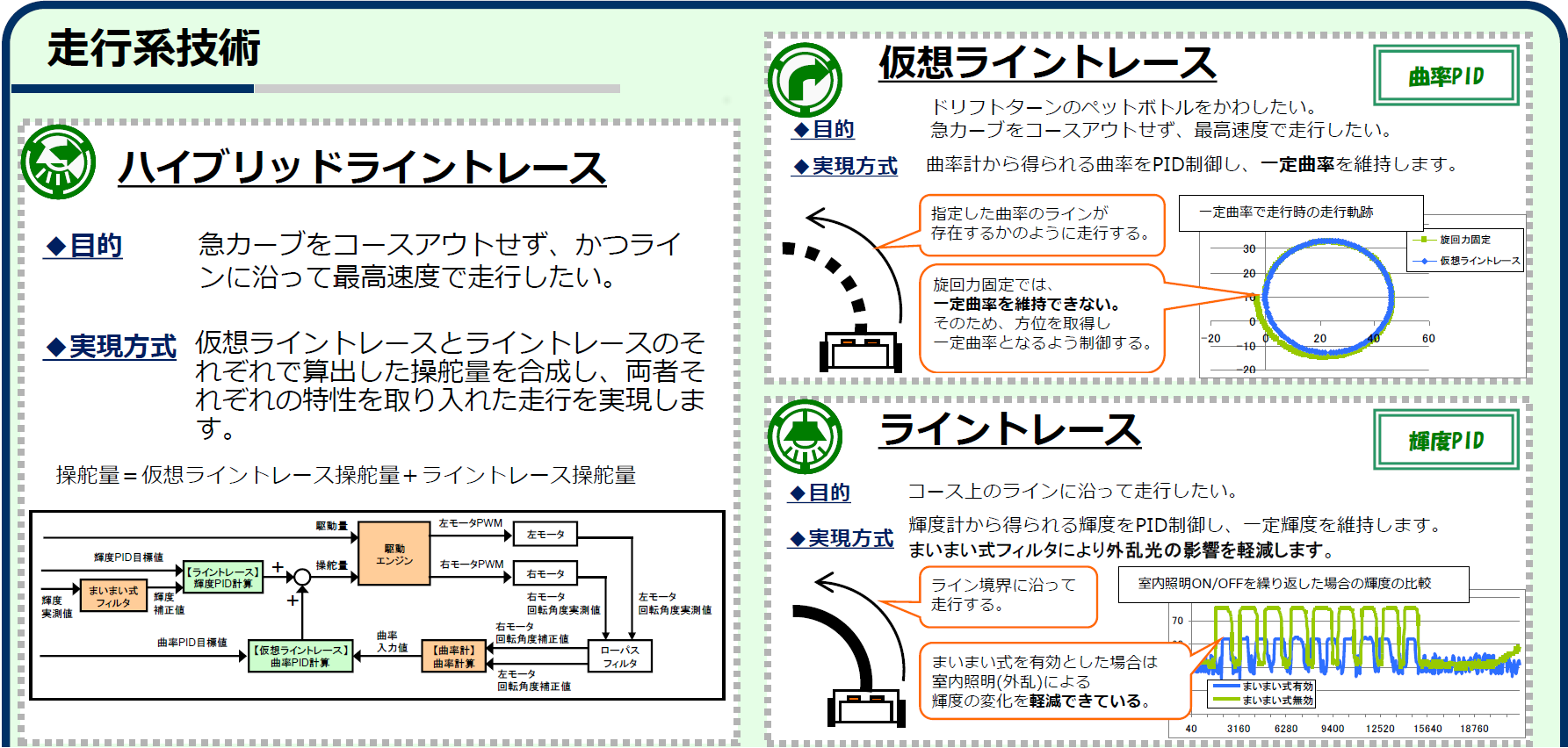
仮想ライントレースとライントレースを融合して、ハイブリッドライントレースを実現しました。
3.2.3. モデル検討・作成
振り返ると、我々のチームは「競技部門」を重視した活動となってしまったように思います。地区大会の優勝インタビューでは、とあるメンバーが「走行部門とモデル部門の注力比率が8:2です」と公言したほどです。
本来、モデルとは要求を実現するための設計図であるべきです。よって、モデルが出来上がってからS/Wを実装し、走行調整を進めていくのが理想形です。しかし、2012年度は(2011年度も)、モデルを本格的に作成し始めたのが8月に入ってからでした(もちろん、要求分析~クラス構成まで実施した上で実装していますが)。
3.1.1.に記載した通り、チームメンバー全員でモデルの査読をしていたため、「何を書いたらよいかわからない」という状態には陥りませんでした。よって、各難所・要素技術を分担し、作成していきました。
モデル作成にあたり、苦労したのは「オリジナリティをモデル中に表現できていない」という点でした。「競技規約が昨年度からあまり変化していないこと」や「モデルの査読をしたこと」の副作用なのか、他チームとの違いを表現することに苦労しました。
例年、関西地区での2回目の試走会では、「モデル相談所」というコーナーが設けられています。モデルの完成度に自信を持てなかった我々のチームは、この相談所にモデルを持ち込みました。やはり、そこで対応してくださった方のコメントは「モデルにストーリーがない」に終始していました。要求分析やクラス構造、振る舞い、要素技術の各々はそれなりに書けているが、「なぜそのような設計にしたか」が見えてこなかったのです。
既に提出期限ギリギリでしたが、その日のうちにメンバーで話し合い、「コンセプトシート」から見直しました。

部品の組み合わせで走行方法をプログラムできることをアピールしました。チームメンバーの誰もが調整可能な走行体となりました。
3.2.4. 難所攻略検討・調整
2011年度より、コースが「ベーシックステージ」と「ボーナスステージ」に分かれたこともあり、「ボーナスステージ」の難所をどれだけ攻略できるかが優勝するための大きな鍵となります。2012年度、我々のチームは「時間をかけてでも確実に難所を攻略する」という方針のもと、攻略方法を検討しました。
難所の中でも特に難しいのが、立体難所と呼ばれる「シーソーダブル」と「階段」です。立体難所では走行体のバランスをとることが難しく、転倒しやすいためです。そこで走行体が持つ「尻尾」を上手く使うことで、「立体難所を確実に攻略できないか?」と考えました。
結果、「シーソーダブル」と「階段」共に成功率を向上させることができました。地区大会、CS大会での難所成功率は100%です。
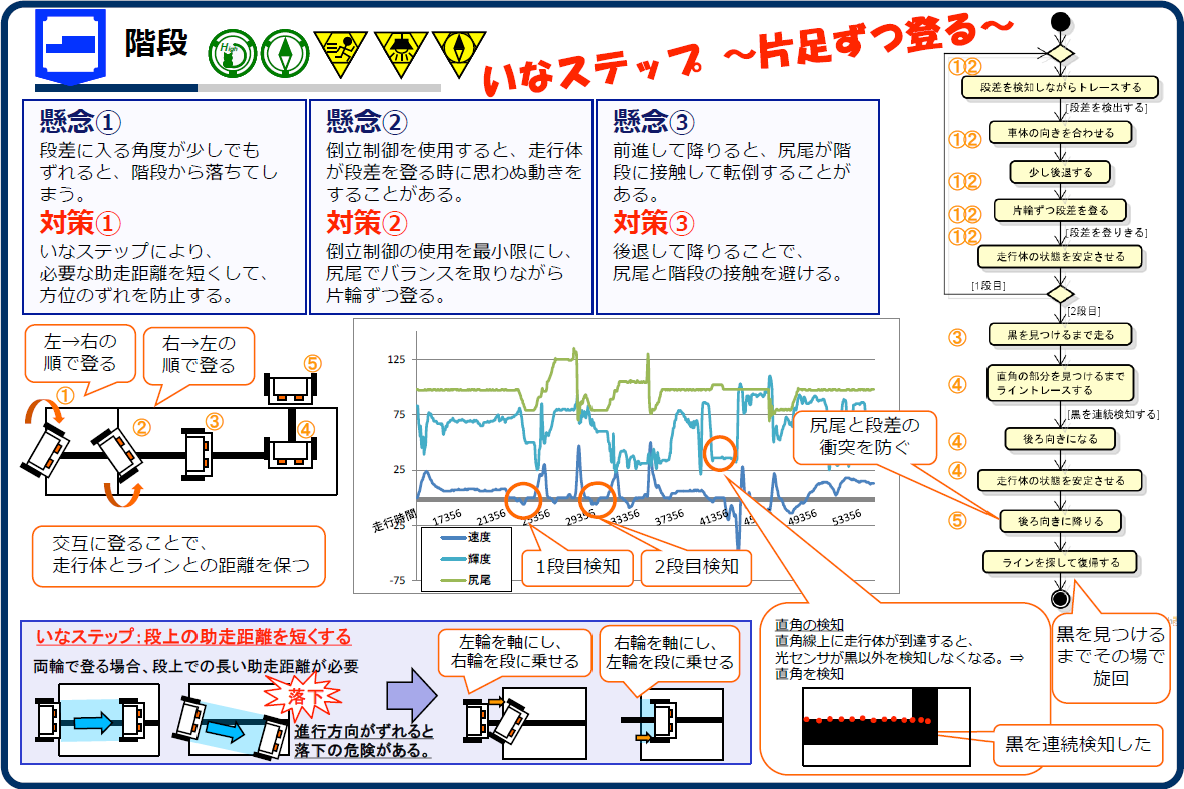
尻尾で走行体を支えつつ、片輪ずつ段差を上ります。ほとんど失敗することなく階段を攻略することができます。
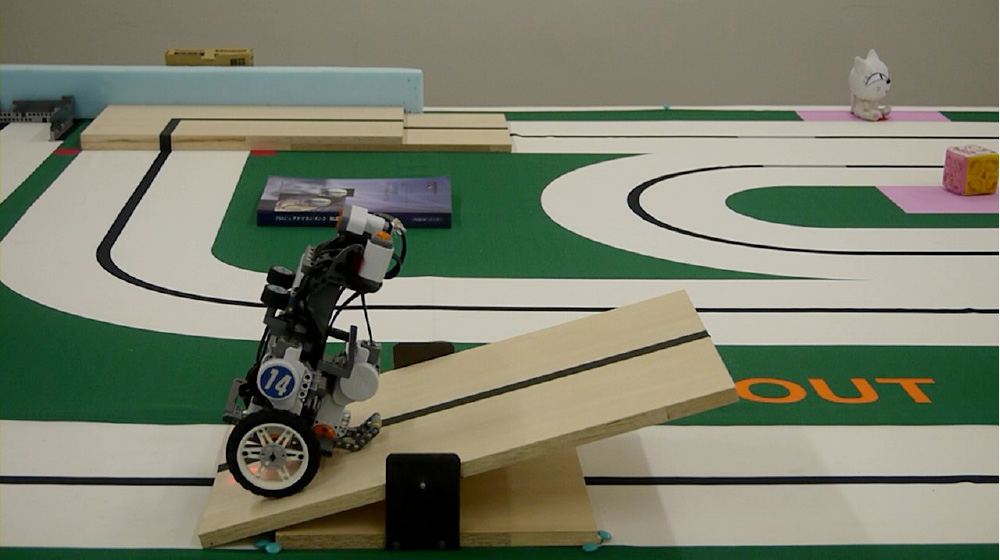
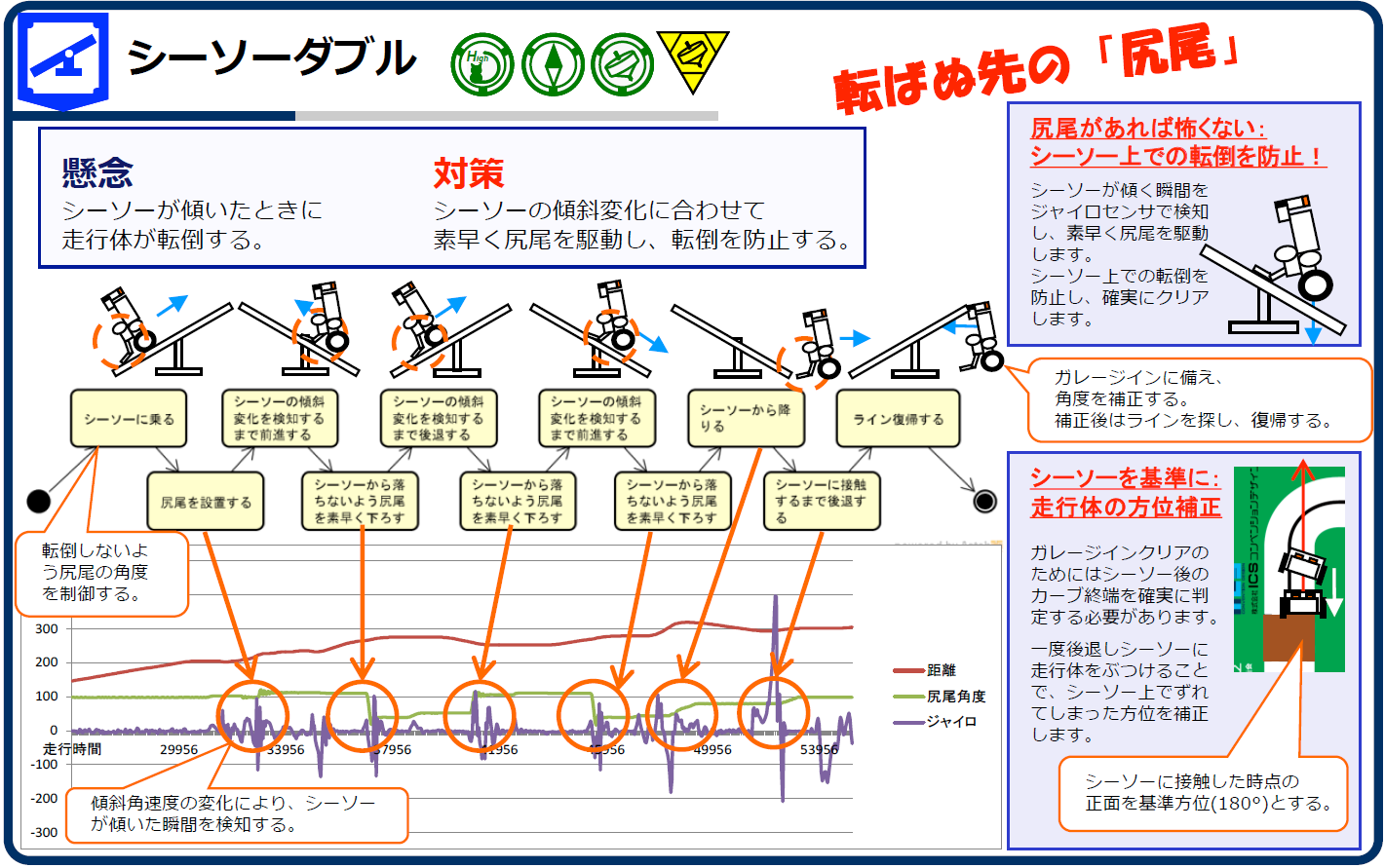
「シーソーの傾斜が変化する瞬間」をジャイロセンサにて検知して、尻尾の角度を調整します。こちらもほとんど失敗することなく攻略できるようになりました。
4. 地区大会までを振り返って
以上が我々のチームの地区大会までの活動状況です。振り返ってみると、要素技術の検討に多く時間を使ってしまいモデルに費やす時間が少なかったように思います。しかし、闇雲に実装・調整を進めるのではなく、仮説に基づいた検証を行った上で実装したことが競技部門での優勝につながったのでしょう。
後編では地区大会~CS大会の振り返り、そして年間を通しての反省点について執筆させて頂く予定です。
【参考リンク】
(リンク先最終アクセス:2013.04)
バックナンバー
この記事の筆者
筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
