SIGGRAPH Asia 2025開催。キーノートから低空ドローンの管制システムを解説するキーノートを紹介
SIGGRAPH Asia 2025開催。キーノートから低空ドローンの管制システムを解説するキーノートを紹介。
4月6日 6:30
2025年12月14日から18日の5日間、コンピュータグラフィックスの国際会議であるSIGGRAPHのアジア版、SIGGRAPH Asia 2025が香港で開催された。元々、SIGGRAPHはアメリカコンピュータ学会(ACM、Association for Computing Machinery)のコンピュータグラフィックスに関する分科会として1974年から開催されてきた歴史のあるカンファレンスだが、2008年からは中国からの参加を促すためにアジアでも開催されているという。今回はこのカンファレンスの最後の3日間にプレスとして参加した。
今回はキーノートとして行われた「Exploring the Low Altitude Airspace: From Natural Resource to Economic Engine」と題されたセッションを紹介する。これはSIGGRAPH Asia 2025の会期3日目、12月16日の9時30分から行われたセッションである。セッションを行ったのは香港科技大学の教授、Harry Shum(沈向洋)氏だ。Shum氏はMicrosoftのリサーチャーとして1996年から2020年まで働いていた経歴を持っており、最後の約7年間はAIに特化したExecurtive Vice Presidentというタイトルを保持していた人物だ。香港科技大学のプロフィールは以下から参照できる。
●参考:Prof. Harry Heung-Yeung SHUM 沈向洋教授

Shum氏はこのキーノートで高度1000m以下の低空域における主にドローンを活用した新しい管制システムについて解説を行った。Shum氏は「低空時代(The Low-Altitude Era」という書籍を他の研究者と共に著作しており、その内容を解説したとも言える。ここで解説されているLow Altitude(低空とは高さ1000mまでの空間を差し、1000mより上は主に定期運航される商用航空機が使用する空間、地上は自家用車や商用車が利用する空間であるという区別だ。
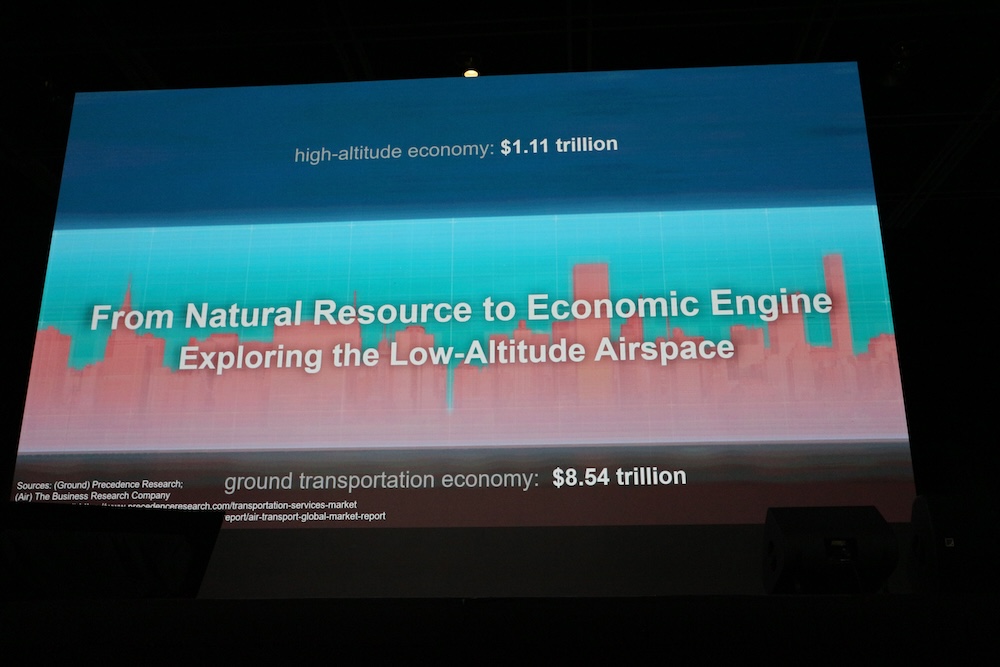
このプレゼンテーションではEraは主にエコノミー(Economyとして解説されており、地上の交通網よりも遥かに多くの経済的インパクトがあることを主張していた。
ここで標高1000m以下にどのような機材が使われているのかを整理した。
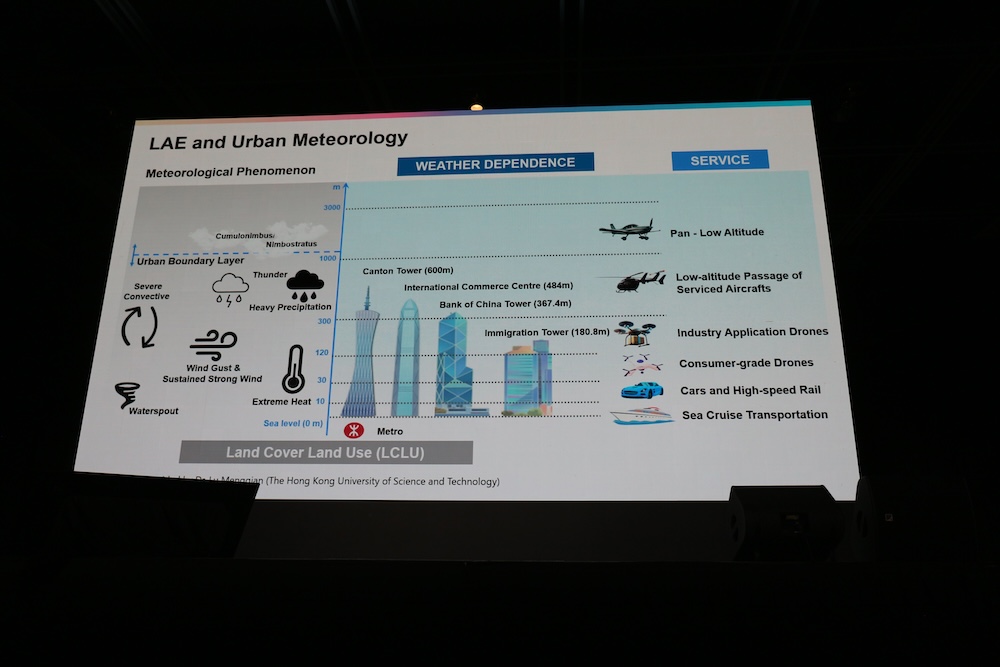
ちなみにリファレンスとして中国(広州、香港などに存在するタワー建造物を使ってその高さを表しているが日本人には東京スカイツリーが妥当なリファレンスだろう。東京スカイツリーは高さ634mで、広州塔(Canton Towerよりも30mほど高い。雲の種類で言えば積乱雲が発生するよりも低いエリアということになる。
ここで1000m以下の空間においてドローンなどを商用利用するための管制システムとしてShum氏は以下の論文を紹介した。
●参考:Low-altitude Air Management and Service System
このシステムはLAMASと呼ばれるものだが、Shum氏が紹介したのはSILAS(Smart Integrated Low-Altitude Systemと呼ばれる包括的な低空管制システムだ。これはすでに深セン市で試行されていると紹介し、一日に6000回以上のフライトが管理されているという。
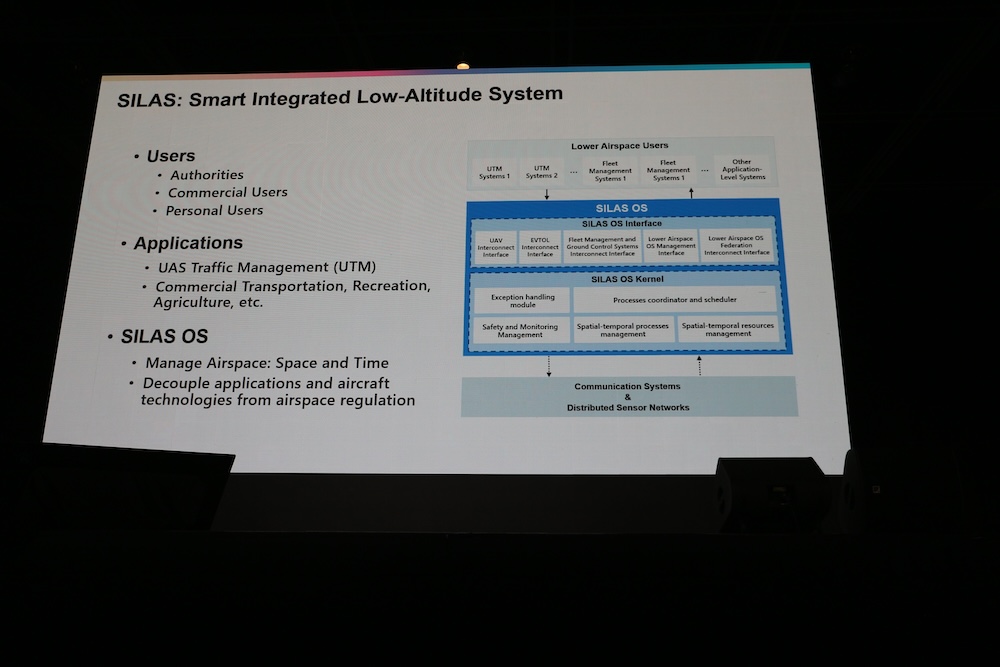
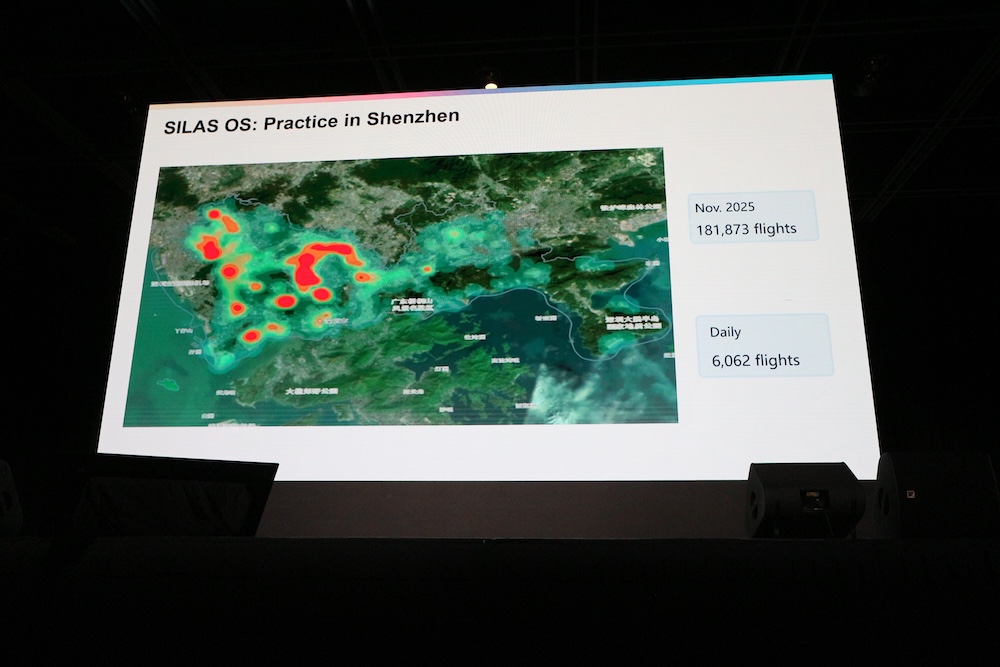
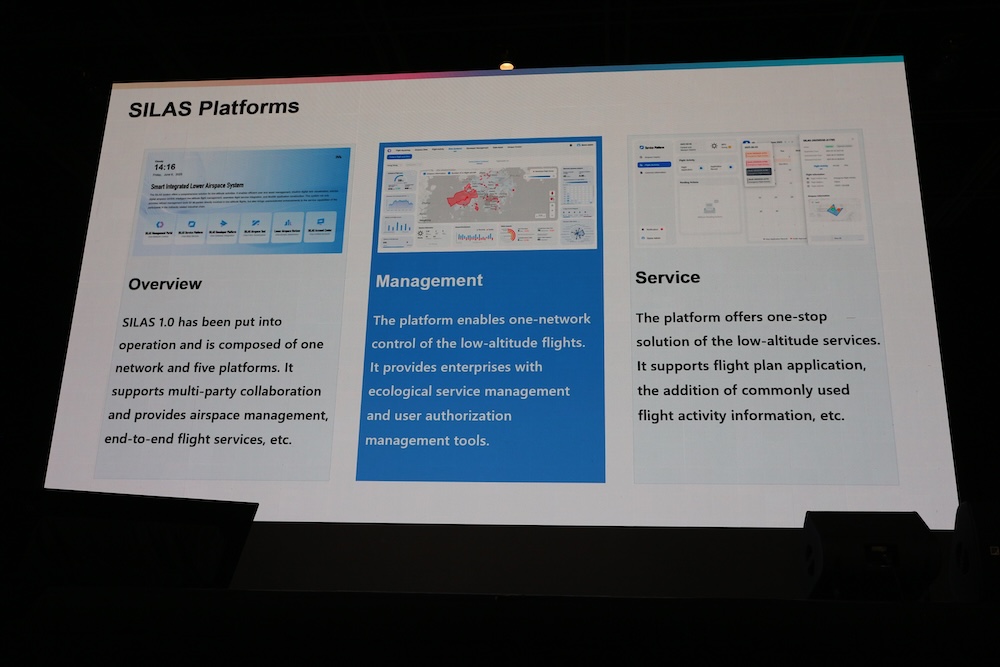
SILASの概要は以下のスライドで概観できるが、システムそのものが単体で稼働するという発想ではなく、行政管理機構との連携、商用サービスを展開する企業との連携などが最初から備わっているところが通常のオペレーティングシステムとは異なる最大の要因だろう。
深センで使われているSILASは低空域のドローンを管理する包括的なワンストップの管理システムであることが説明されている。
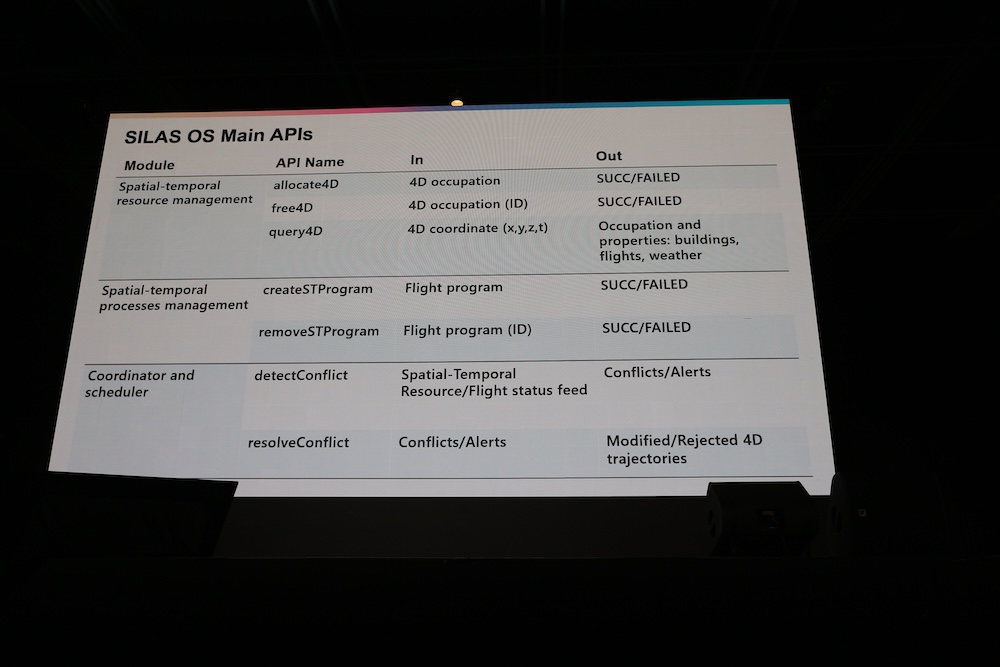
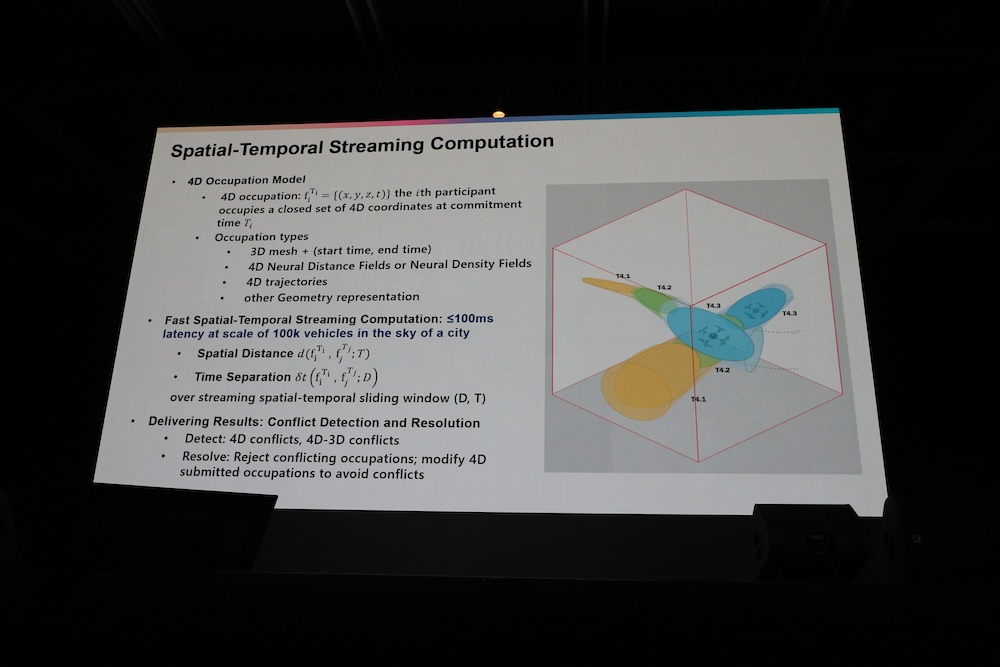
ここでドローン管制に必要なAPIを紹介。低空域ドローンにおいては4つのディメンション(空間座標であるX軸、Y軸、Z軸に加えて時系列のTが必要であることが記されている。空間を飛行するドローンはその座標値に加えてどの時点でその座標(X、Y、Zにドローンが存在するのか?を管理しなければいけないことを示している。
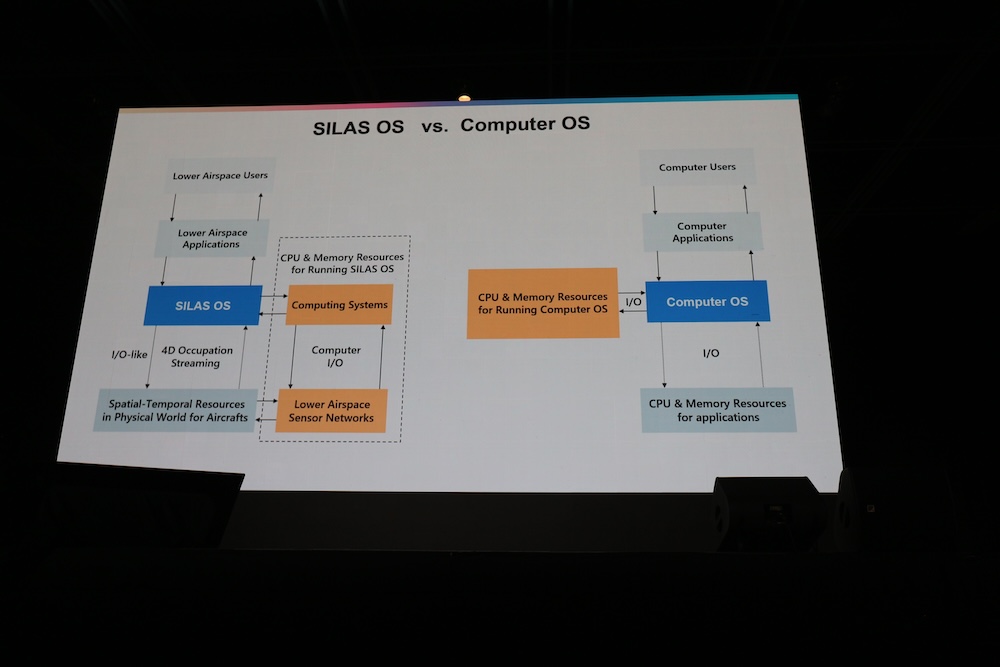
このスライドでは従来のオペレーティングシステムと比較してSILASがより上位のレイヤーでドローンを管理する発想であることを示している。
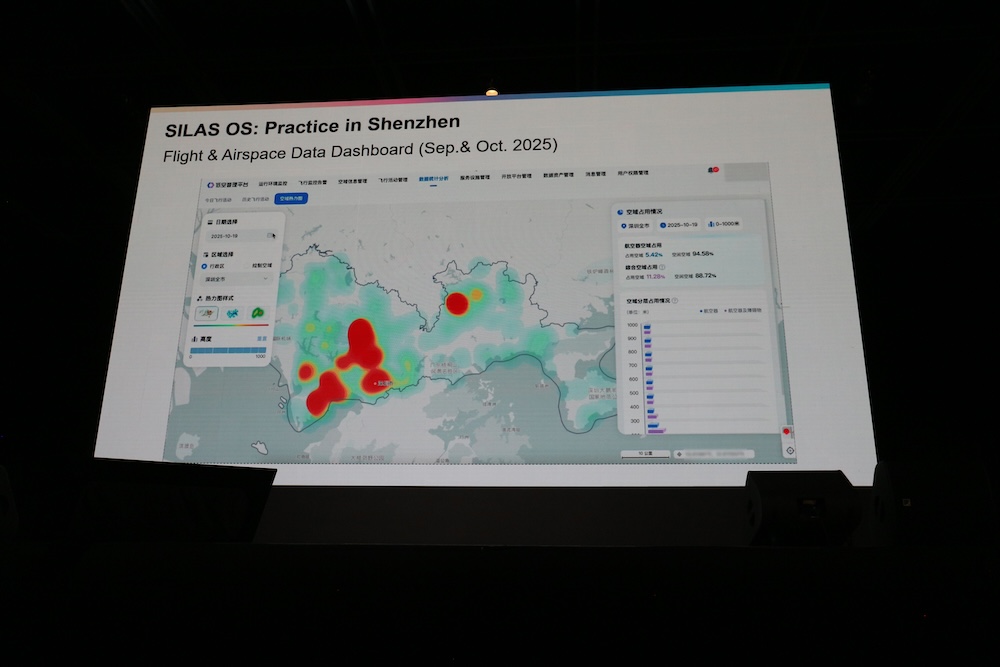
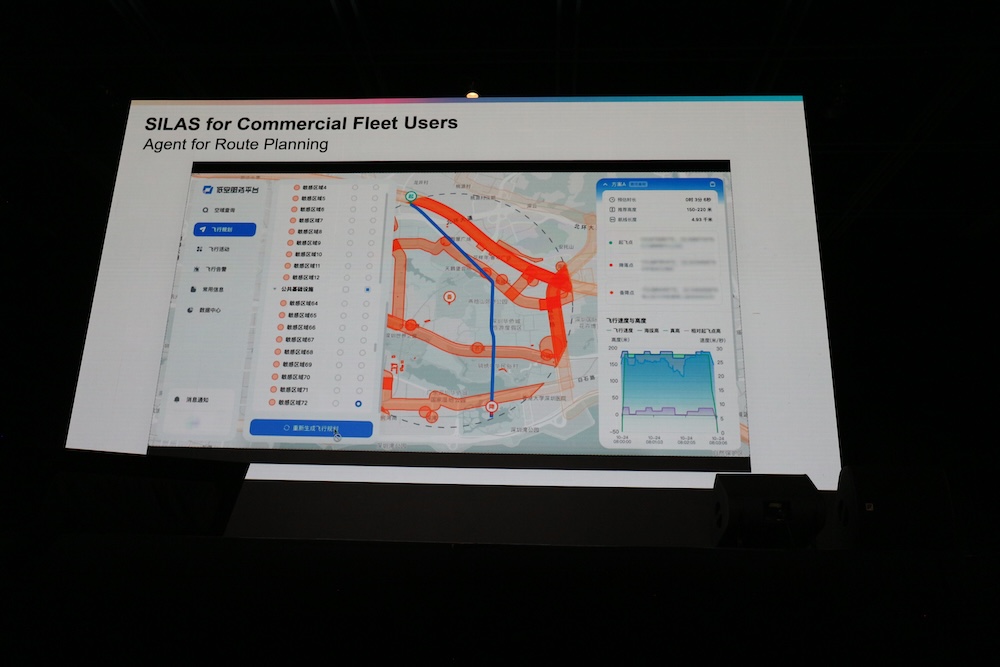
実際に商用のための飛行経路を計画するためのインターフェースを紹介。ここでは青いラインがドローンのルート、赤い帯が他のドローンが飛行するエリアもしくは飛行を禁止されているエリアをしていると思われる。地図上はXY軸しか見えないが実際には高度と時間を座標値として与えられてドローンを飛行させることになる。
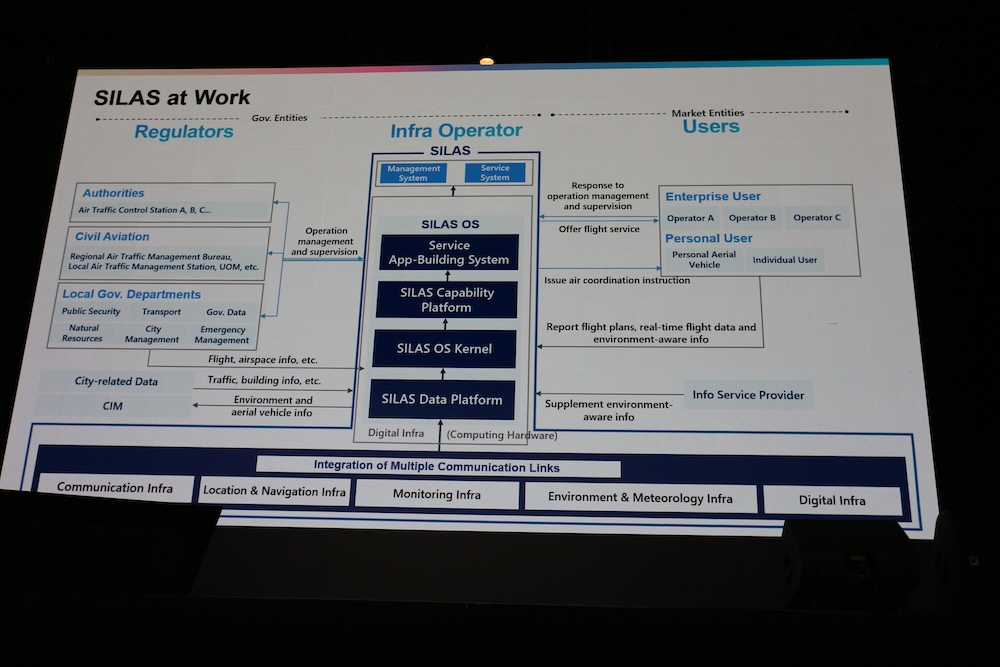
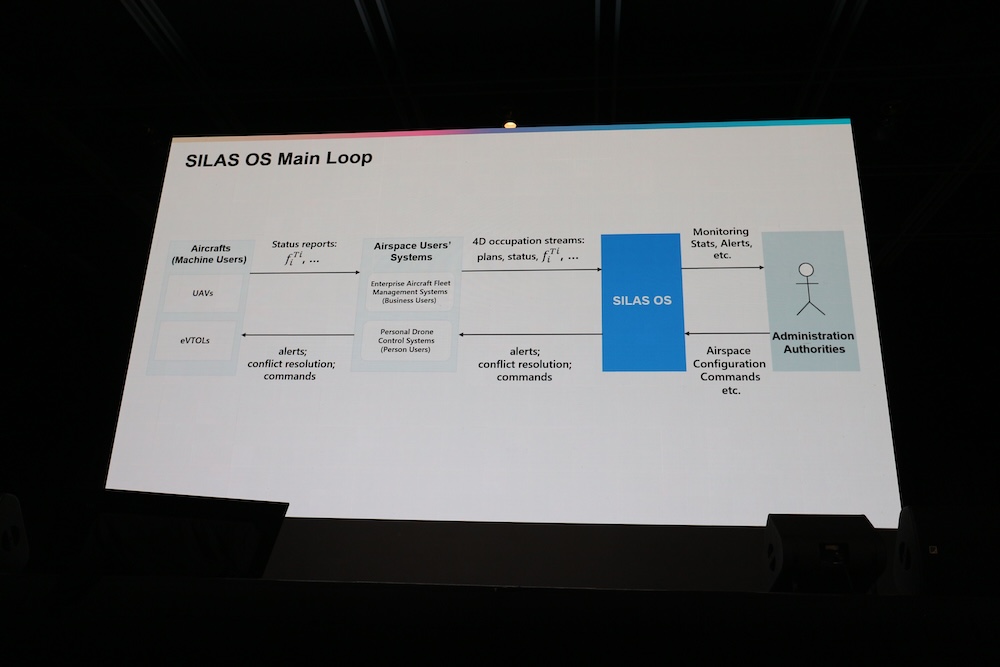
SILASが単なるドローン管制システムではないことが次のスライドで解説される。ここでは商用サービスと行政管理機構がSILASの両サイドに存在して規制したい側と利用したい側をマッチングさせるように作られていることがわかる。Shum氏はSILASは行政管理機構が最初に使うことになり、商用サービスはそれに従属することになると説明しており、何よりも行政側の必要性からこのシステムが開発されたことを解説した。
また空間を飛行するドローンが衝突を避けるために4つの次元に加えて風の影響などを加えて幅を持たせた筒状の空間を占拠する演算処理が必要となることが説明されている。その演算には100ms以下のレイテンシーが必要だという。
ここまでの内容で「どうして低空ドローンの管制システムがSIGGRAPHのキーノートで語られているのか?」と疑問を持った読者も居るだろう。それについてはこのスライドである程度は解説されることになる。
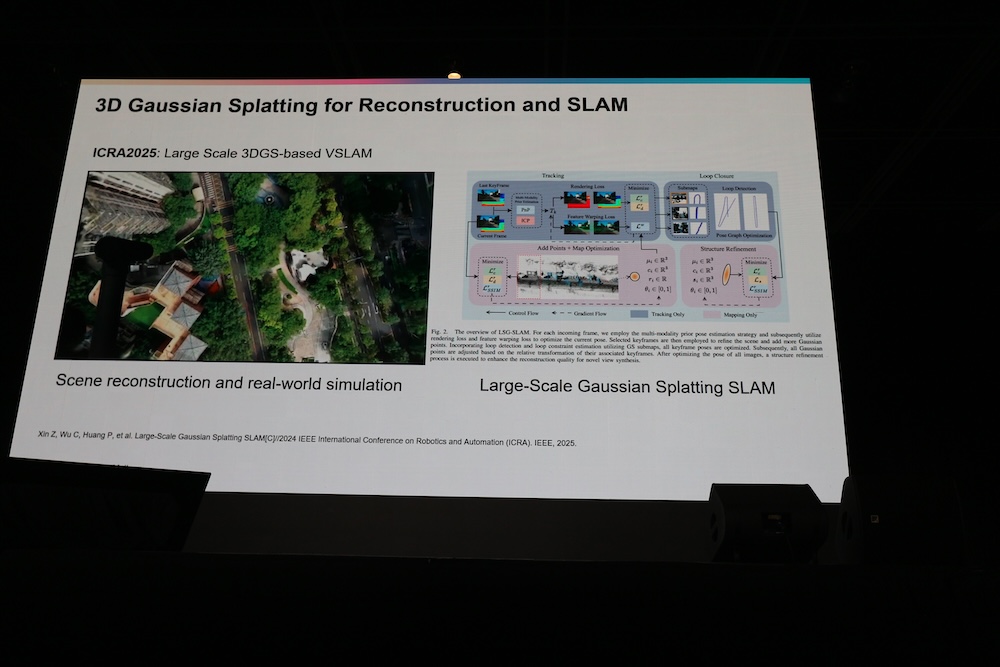
ドローンが障害物などを避けて飛行するためには自機の周りに何があるのかをリアルタイムで認識する必要がある。そのために現在、コンピュータグラフィックス界では大きなブレークスルーとして扱われている3Dガウシアンスプラッティングを使ってドローンが撮影した連続したカメラ画像から3Dモデルを生成し、周りの障害物を認識するという内容だ。つまり地図データや建造物のデータをあらかじめモデリングして利用するのではなくリアルタイムでドローンのカメラが捉えた画像から現実世界を構成し、その座標に何があるのか?を知ることで衝突を避けるという発想だ。3Dガウシアンスプラッティングを使った3次元のリアルタイム認識については以下の動画で解説されているので参考にされたい。
●参考また3DガウシアンスプラッティングについてはNTTデータのブログでも解説されているので参考にされたい。ここではオブジェクト単位の認識ができないために編集が難しいことが課題として挙げられているが空間を飛行するドローンにとっては「空間に物体が存在すること」だけが分かれば回避行動はとれるため問題にはならない。
●参考:3D再現の最前線:3D Gaussian Splattingの活用シーンと課題
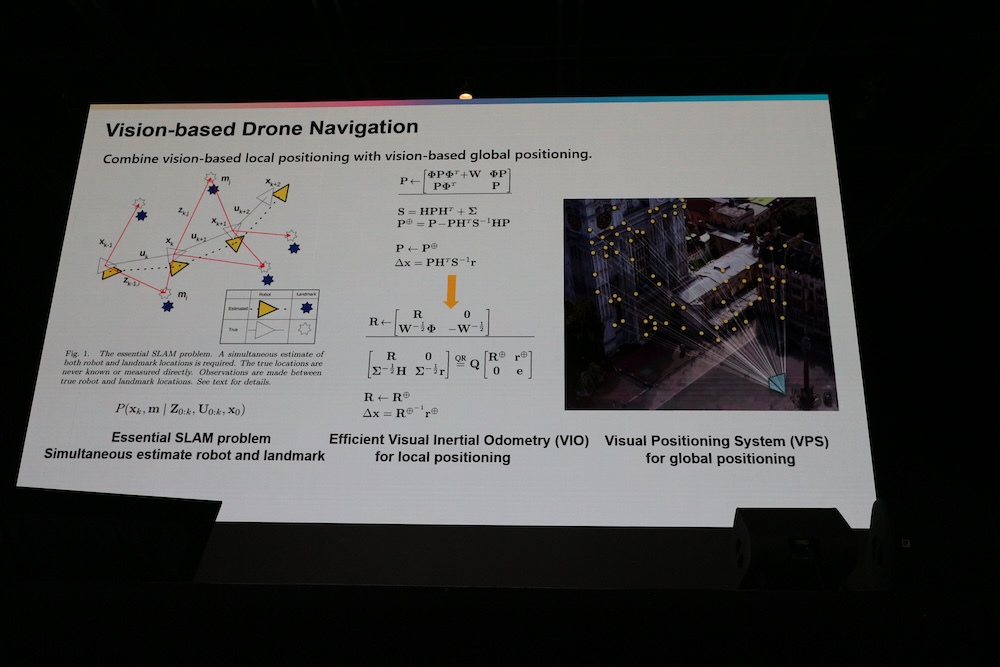
画像を使った位置認識についても解説された。ここではSLAM(Simultaneous Localization and Mappingのためのテクノロジーが解説されている。SLAMは継続的に位置を測定し物体や地図を生成するためテクノロジーで建物内で稼働する自走ロボットなどでも必要とされる機能である。
SIGGRAPHの参加者的にはSILASがどのように低空域を管制するのかという大きな観点よりもドローンが位置認識や障害物の認識のためにリアルタイムの3Dガウシアンスプラッティングでどの程度、実用に耐えられるのか?という情報が欲しかったのかもしれないが、その辺りの内容については特に解説されることはなかった。
Shum氏のプレゼンテーションは低空域のドローンに大きなビジネスチャンスがあることを強くアピールした内容となった。実際に深センでは稼働していること、行政管理機構と商用サービスを含む包括的な管制システムであることを解説した。しかし課題については特に触れられなかったのは学会での発表という環境のせいかもしれない。SIGGRAPHもAAAIも同様だが、学会での論文発表は主に良い面、つまり新しいテクノロジーが従来の手法と比べてどの程度良くなったのか? を数値を使って解説するのが目的で、今後の課題や改善すべき側面についてはあまり大きく触れられない傾向にある。ちなみに参加者からの質問、「システムとしては全体としてどのようなものになるのか?」に対しては「現在のモバイルネットワークオペレータが実装しているシステムに外形的には似ているものになるだろう。つまり中央集権的な管理体系を持つものの各拠点に処理が分散される地域分散の中央集権的システムになると思う」と回答していた。この回答はモバイルオペレータが同様の管制システムを構築する可能性が高いことを示唆していると言えるだろう。
これから多くの国や地域がドローンを新しいモビリティの手段として活用することは必至だ。その際にこの試みとプラットフォームは大いに参考になると思われる。以下のBaiduの動画は中国語のアナウンスではあるが、システムの雰囲気を掴むには十分だろう。参考にされたい。

この記事をシェアしてください
関連記事
SIGGRAPH Asia 2025から物理AIを指向するNVIDIAのセッションを紹介
5月1日 6:00
SIGGRAPH Asiaで理解した国際的な学会の上手な過ごし方とは?
5月7日 6:00
SIGGRAPH Asiaから、スポンサーのAdobeセッションを紹介
4月28日 6:00
AIは実社会でどのように活用されているのか⑤ー画像認識(3)(Image Recognition)
2022年3月16日 6:30
AIの国際会議、AAAI-26がシンガポールで開催。3万件以上の応募論文をレビューする生成AIレビューを紹介
4月8日 6:00
AAAI-26から数多くの参加者で賑わいを見せたポスターセッションと対照的なスポンサーブースを紹介
5月26日 6:00
バックナンバー
この記事の筆者

筆者の人気記事
SASEのCato Networks、CEOによるセミナーとインタビューを紹介
2020年4月16日 6:00
Rustのエコシステムの拡がりを感じるデスクトップアプリのためのツールキットTauriを紹介
2022年12月16日 6:00
Zabbix式オープンソースの秘密に迫る
2025年1月31日 6:00
WebAssemblyとRustが作るサーバーレスの未来
2020年4月21日 6:00
三菱電機が設立したOSPOのメンバーにインタビュー。「インナーソース」を戦略的に使う背景とは?
2025年10月3日 6:00
エンタープライズLinuxを目指すSUSE、Red Hatとの違いを強調
2015年2月3日 19:00
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
