回路の搭載
回路の搭載
シャーシに回路を搭載するにあたり、シャーシのモーターと電池ケースの凹凸を削ります。
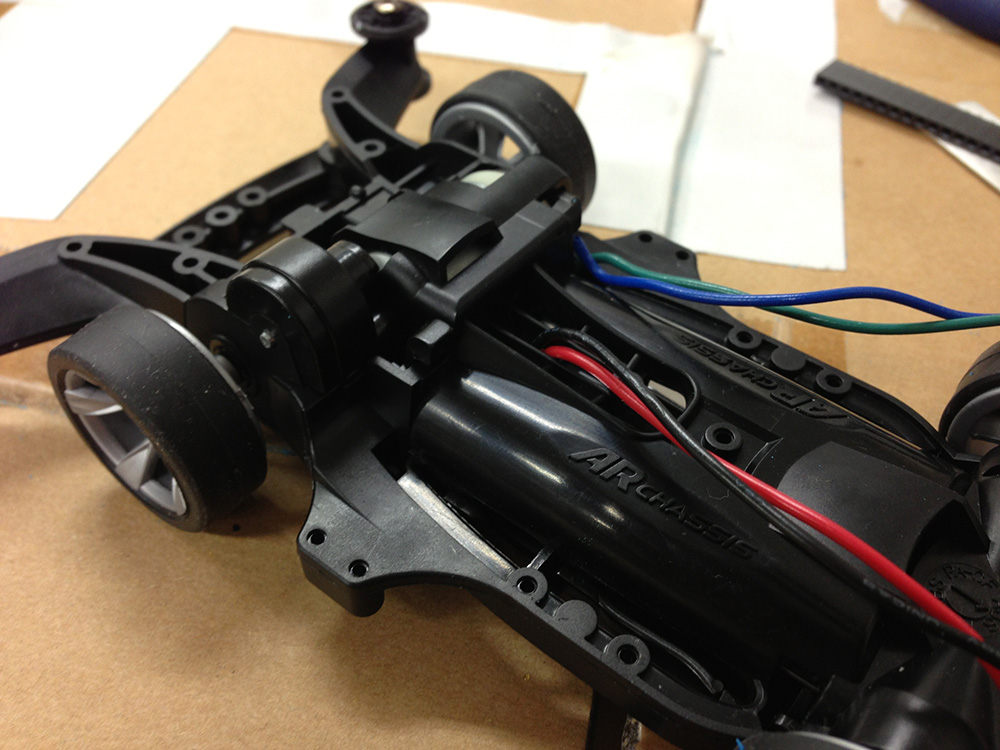
ニッパーを使い、次のように削っておきます。

いきなり回路を接着するのは怖いので、セロハンテープで仮止めして位置を確認します。
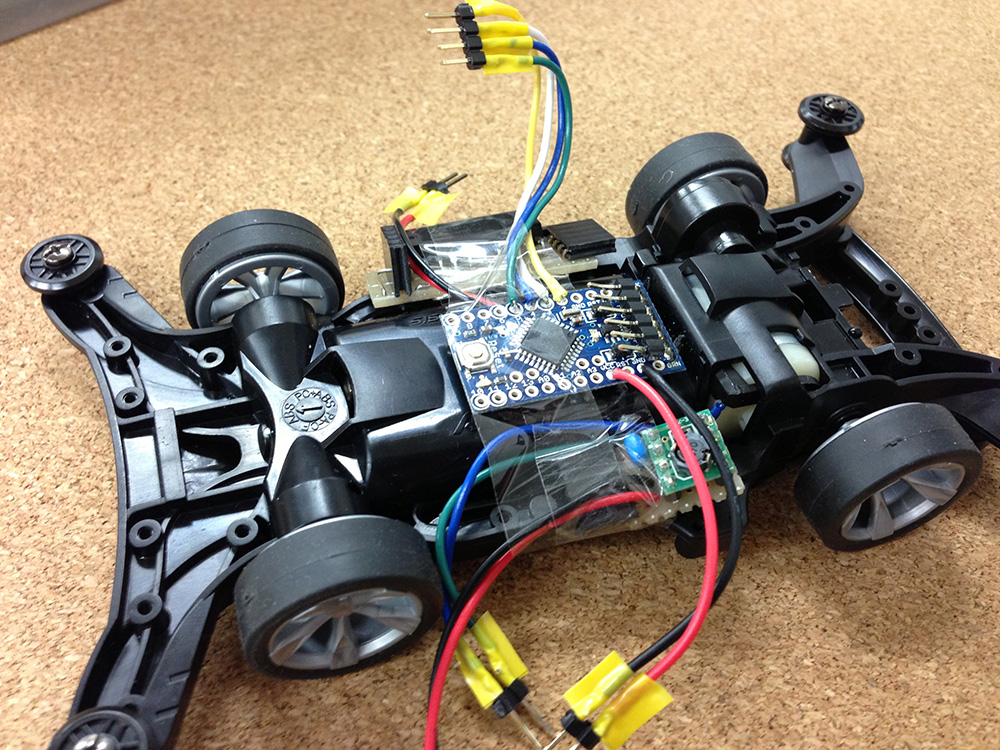
左右に制御回路とDC-DCコンバータを仮止めします。
このようにボディがうまくはまるように位置を調整します。
この時、気づいたのですが、このままだとFETモジュールを積んだ制御回路のソケットがタイヤにあたってしまいます。そこで、制御信号を装着する側のソケットを立てるように変更しました。

また、回路が接触するとまずいので、ビニールテープで各線の接続部分を覆っています。 本来なら、熱収縮チューブを使うのですが、在庫が切れていたため、どこでも手に入るビニールテーブで代用しています。
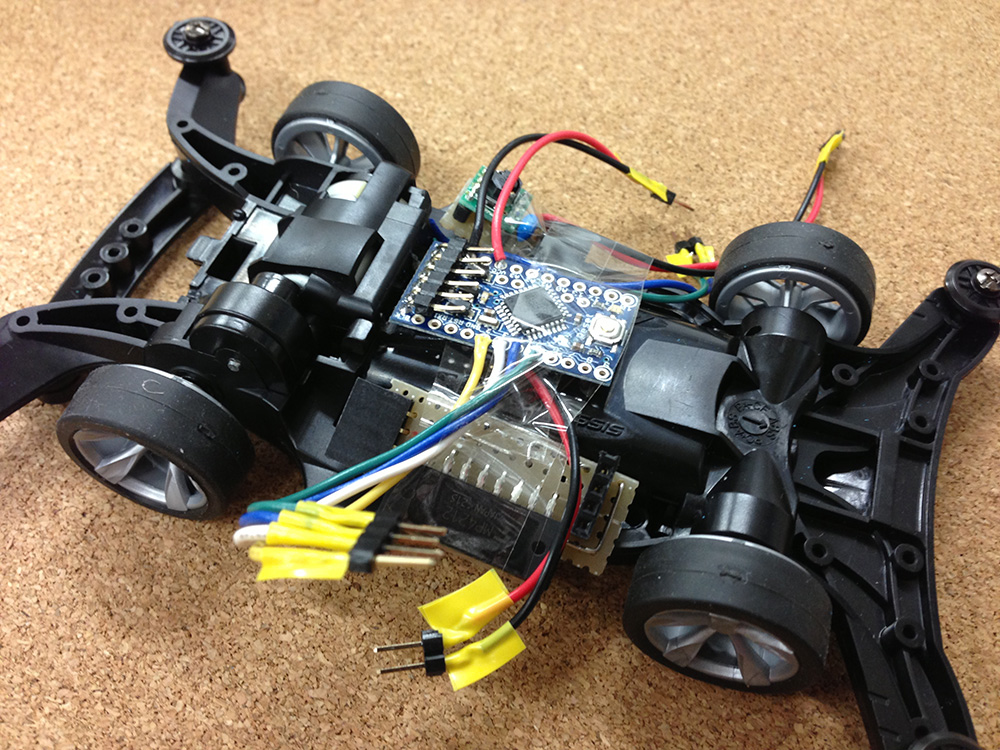
本止めには両面テープを使用します。これはクッションの入ったタイプのもので、凹凸面があるところでも止めることができます。

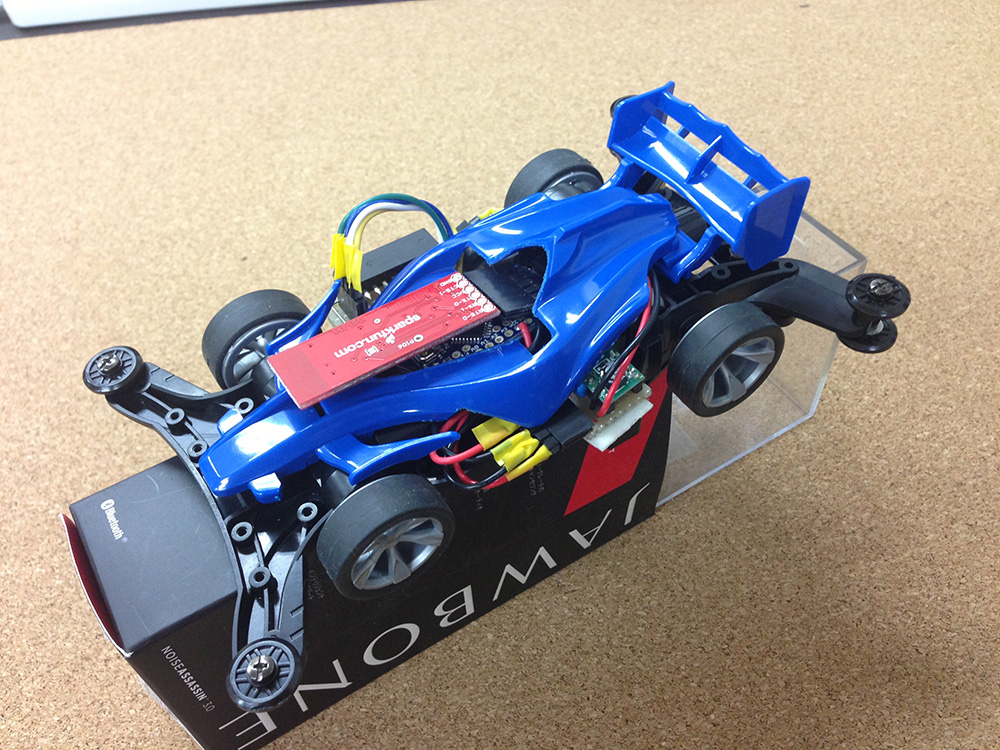
各回路の裏側に両面テープを貼り、先ほど調整した位置に回路を載せていきます。完成すると、次のように綺麗に回路が載ります。

DC-DCモジュール側はこのような形で、回路を搭載します。

制御回路側はこのような形で、回路を搭載します。

Arduino Mini Proはモーターの真上に設置します。

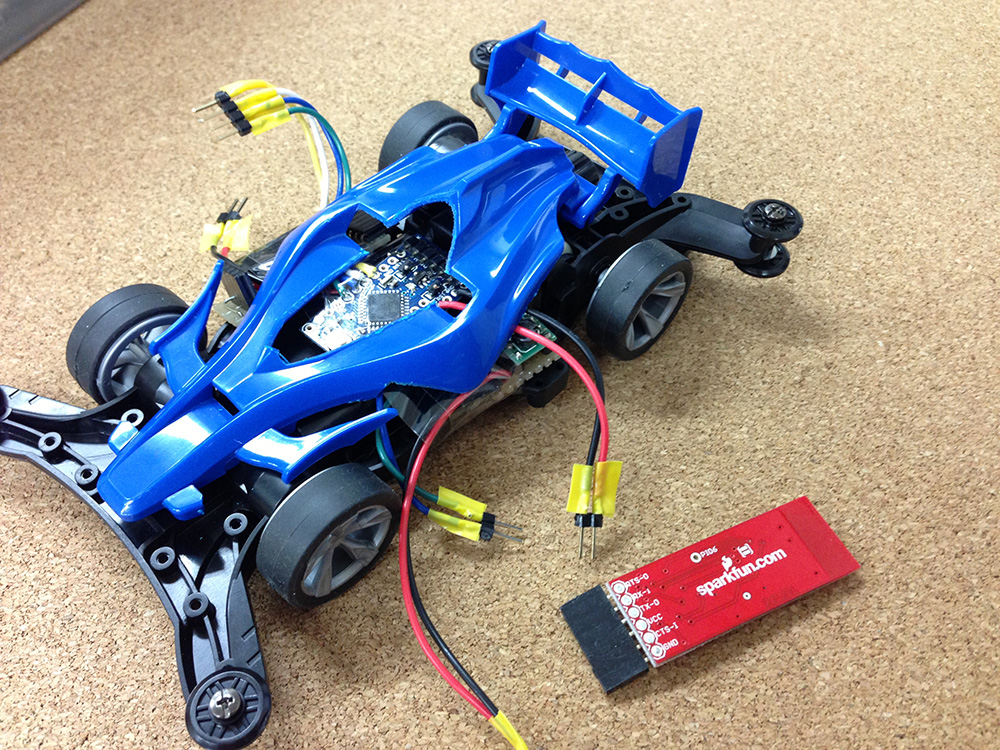
そして、ボディからはみ出す形でBluetoothモジュールを接続します。

動作確認
タイヤだけが空転する台を用意して、その上にミニ四駆を乗せます。
いつもの通り、第5回の記事「Arduinoを始めよう!(3)Bluetooth編」の手順にそって、BluetoothとPCを接続します。あとは、コマンドf / b / sを送ります。
これで動作が確認出来れば、あとは走らせるだけです!
いかがでしたか?ミニ四駆が無事に走った皆さん、おめでとうございます!
うまく走らなかった場合は、第8回の記事「ミニ四駆にArduino Pro Miniを搭載して走らせてみよう!」で紹介したデバッグテクニックを使って、原因を突き止めて下さい。前回まででしっかりと動作確認していれば、ここでつまずくことはほとんどないはずです。それでも動かない場合は、接触不良の可能性が大きいので、テスターで信号線の接続を十分に確認して下さい。
今回の課題と次回予告
Pythonからシリアル通信を行う方法を調べて下さい。ライブラリを使うと簡単にできるはずです。
Arduinoミニ四駆の制作は今回の記事で終わりです。次回は最終回として、Fuller, Inc.で作製したミニ四駆の解説をしながら、今回作製したArduinoミニ四駆のアイデアを膨らませます。また、PythonからArduinoミニ四駆を制御してみます。次回までに作製したミニ四駆を色々と触って、夢を広げておいて下さい!
【参考リンク】
バックナンバー
この記事の筆者
筆者の人気記事
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。
